从零实现一个3D目标检测算法(1):3D目标检测概述_从零实现一个3d目标检测算法(1):3d目标检测概述_bounding box head_自动驾驶小-程序员宅基地

本文是根据github上的开源项目:https://github.com/open-mmlab/OpenPCDet整理而来,在此表示感谢,强烈推荐大家去关注。使用的预训练模型也为此项目中提供的模型,不过此项目已更新为v0.2版,与本文中代码略有不同。
本文实现的3D目标检测算法是PointPillars,论文地址为:https://arxiv.org/abs/1812.05784,使用的激光雷达点云数据是KITTI数据(http://www.cvlibs.net/datasets/kitti/eval_object.php?obj_benchmark=3d)。
文章目录
1. 3D目标检测
在开始写代码实现PointPillars检测算法之前,我想先介绍一些关于点云3D目标检测的背景知识。大家有时间的话可以看看下面这个报告,是OpenPCDet项目作者此前分享的报告(https://www.bilibili.com/video/av89811975?zw)。
(2021-04-11日补充):点云3D目标检测算法库OpenPCDet解析与开发实践(Video)
基于点云场景的三维物体检测算法及应用
(2021-1-27日补充):这是PointNet作者2021年分享的报告《3D物体检测发展与未来》,对3D物体检测感兴趣的朋友可以看看,PointNet作者对PointPillars算法进行了解读。
【PointNet作者亲述】90分钟带你了解3D物体检测算法和未来方向!
1.1 3D目标检测研究现状
毋庸置疑,在自动驾驶或辅助机器人等应用中,3D目标检测现在变得越来越重要。在这当中,激光雷达(LiDAR)是使用最为广泛的3D传感器,LiDAR可以生成稀疏,不规则的点云数据。
关于3D目标检测,根据点云表示方法大致可以分为两类:the grid-based methods 和 the point-based methods。下面简要介绍这两种方法:
3D Object Detection with Grid-based Methods:由于点云是不规则的,之前的学者通常会对点云进行投影或栅格化处理,转换成规则的grid数据格式,然后再使用2D或3DCNN处理。
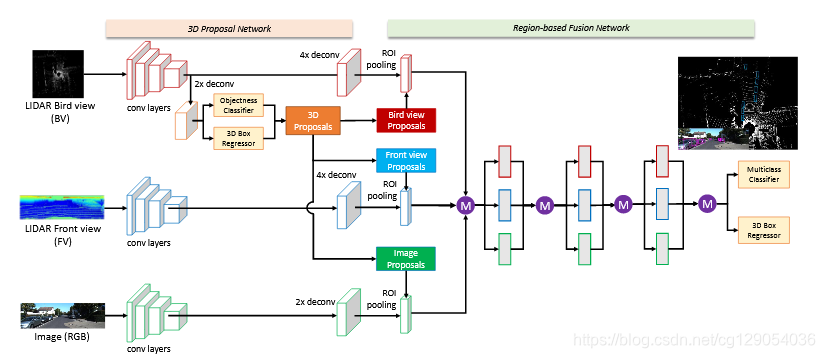
MV3D(https://arxiv.org/abs/1611.07759)将点云投影到鸟瞰图或前视图上进行处理,然后使用多个预定义的3D anchors来生成3D bounding boxes。- 除了将点云投影到鸟瞰图上,还可以将点云直接转换为
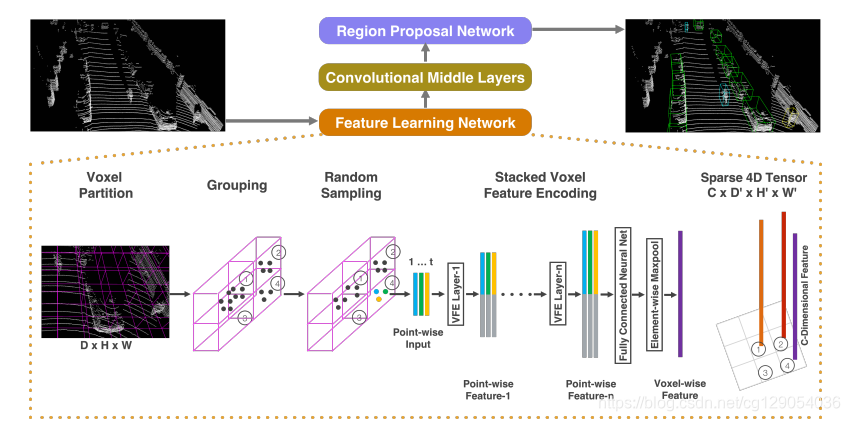
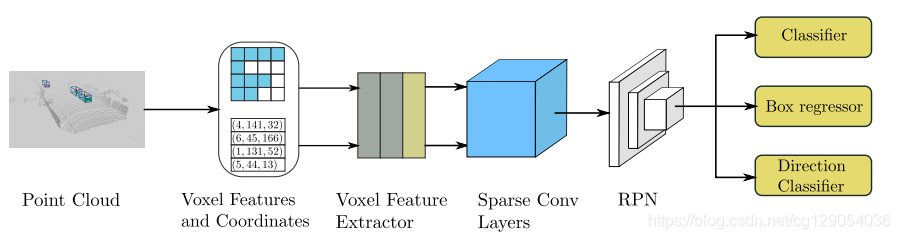
3D Voxels格式,然后使用3DCNN来检测,这其中的代表论文有VoxelNet(https://arxiv.org/abs/1711.06396),Second(https://www.mdpi.com/1424-8220/18/10/3337)。
| MV3D | VoxelNet | Second |
|---|---|---|
 |
 |
 |
以上方法虽然能够高效的生成3D候选方案,但是其目标检测感受野往往是有限的,点云在转换成grid时,不可避免的会出现信息丢失的情况。 |
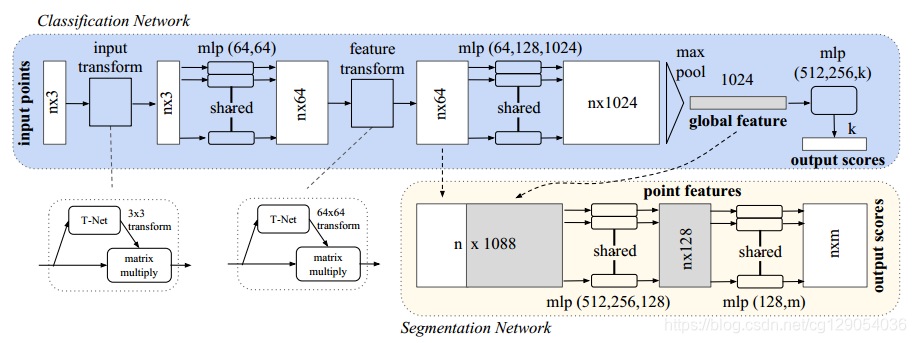
3D Object Detection with Point-based Methods:基于Point的方法大多数都是使用PointNet(https://arxiv.org/abs/1612.00593)网络进行点云特征学习,这使得网络能有更灵活的感受野进行点云特征学习,同时也保留了点云的原始数据信息。
这其中的代表论文是PointRCNN(https://arxiv.org/abs/1812.04244),这是一个两阶段的目标检测方案,第一阶段通过PointNet++网络将点云分为前景点和背景点,然后对每一个前景点生成一个候选方案,第二阶段对前景点及其候选方案进行进一步优化,生成最终的bounding box。
| PointNet | PointRCNN |
|---|---|
 |
 |
1.2 点云3D目标检测开源库
这里引用PCDet作者之前分享的文章(https://zhuanlan.zhihu.com/p/152120636)。PCDet 3D目标检测框架的整体结构设计与优势为:
数据—模型分离的顶层代码框架设计思想:
与图像处理所不同,不同点云数据集中3D坐标定义与转换往往使研究者很是迷糊。因此,
PCDet定义了统一的规范化3D坐标表示贯穿整个数据处理与模型计算,从而将数据模块与模型处理模块完全分离,其优势体现在:
- 研究者在研发不同结构模型时,使用统一标准化的3D坐标系进行各种相关处理(比如计算
loss、RoI Pooling和模型后处理等),而无需理会不同数据集的坐标规定差异性;- 研究者在添加新数据集时,只需写少量代码将原始数据转化到标准化坐标定义下,
PCDet将自动进行数据增强并适配到各种模型中。PCDet数据—模型分离的顶层设计,使得研究者可以轻松适配各种模型到不同的点云3D目标检测数据集上,免去研发模型时迷失在3D坐标转换中的顾虑。
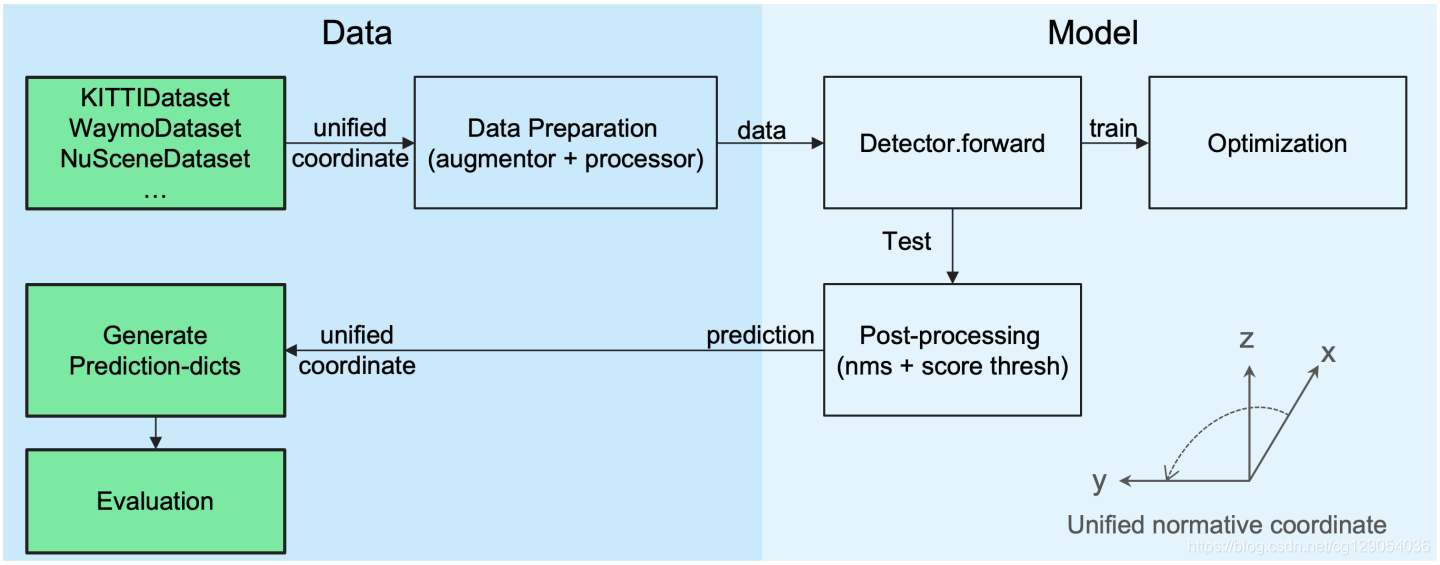 统一的3D目标检测坐标定义:
统一的3D目标检测坐标定义:
不同的点云数据集在坐标系以及3D框的定义上往往不一样(KITTI数据集中的camera和LiDAR两个坐标系经常让人混乱),因此在 PCDet 中采用了固定的统一点云坐标系,以及更规范的3D检测框定义,贯穿整个数据增强、处理、模型计算以及检测后处理过程。3D检测框的7维信息定义如下:
3D bounding box: (x, y, z, dx, dy, dz, heading)
其中,(x, y, z) 为物体3D框的几何中心位置,(dx, dy, dz)分别为物体3D框在heading角度为0时沿着x-y-z三个方向的长度,heading为物体在俯视图下的朝向角 (沿着x轴方向为0度角,逆时针x到y角度增加)。
基于 PCDet 所采用的标准化3D框定义,再也不用纠结到底是物体3D中心还是物体底部中心;再也不用纠结物体三维尺寸到底是l-w-h排列还是w-l-h排列;再也不用纠结heading 0度角到底是哪,到底是顺时针增加还是逆时针增加。
灵活全面的模块化模型拓扑设计:
基于下图所示的灵活且全面的模块化设计,在PCDet中搭建3D目标检测框架只需要写config文件将所需模块定义清楚,然后PCDet将自动根据模块间的拓扑顺序组合为3D目标检测框架,来进行训练和测试。
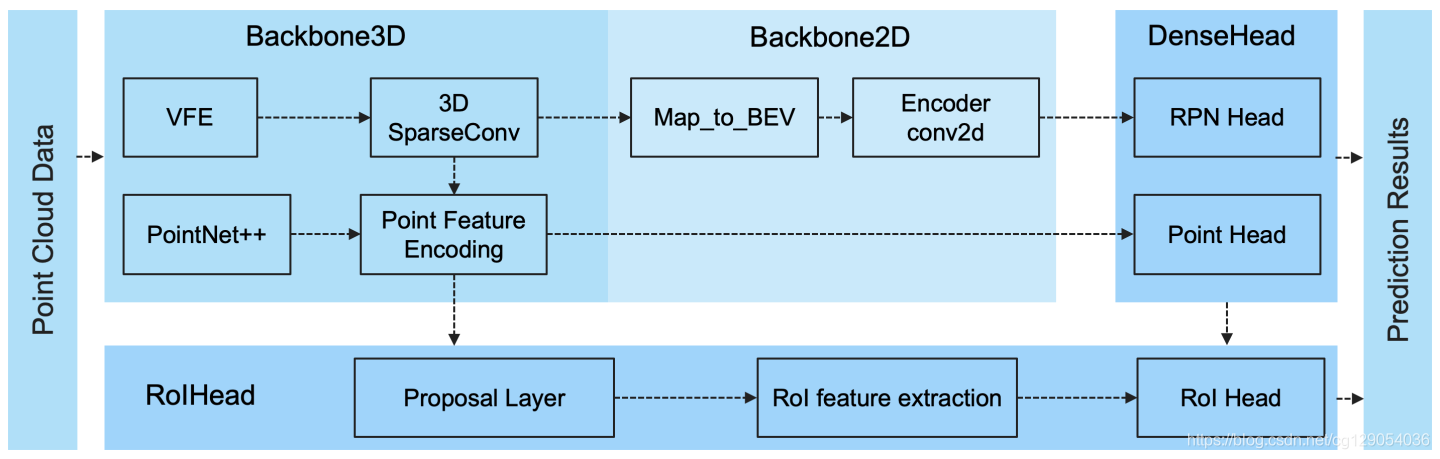 PCDet可以支持目前已有的绝大多数面向LiDAR点云的3D目标检测算法,包括
PCDet可以支持目前已有的绝大多数面向LiDAR点云的3D目标检测算法,包括voxel-based,point-based,point-voxel hybrid以及one-stage/two-stage等等3D目标检测算法。

2. PointPillars网络及工程概述
2.1 PointPillars工作原理
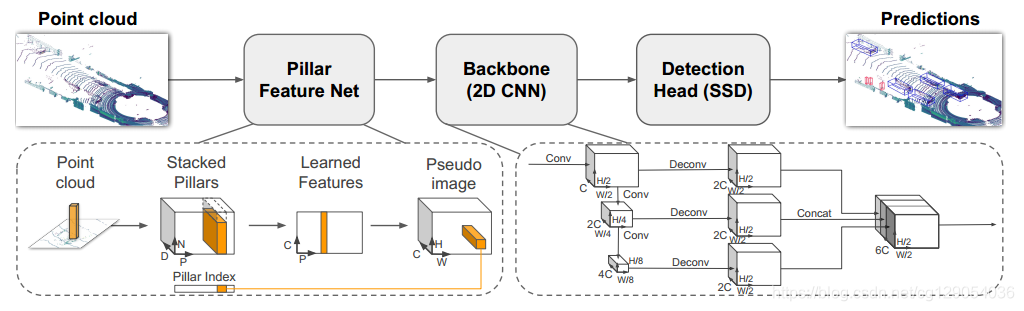
现在不妨先了解一下PointPillars是如何工作的。PointPillars整体思路是将3维的点云转成2维的伪图像,然后使用二维卷积网络进行端到端的目标检测,网络结构如下图所示。
 下面分别介绍
下面分别介绍PointPillars的三个子网络部分:
(1)Pillar Feature Net
Feature Net主要是负责把点云数据处理成类似图像的数据。首先可以将x-y平面投影为一个大小为h x w的网格。每一个小网格表示为一个Pillar,这样就划分出h x w个Pillar。
原始的点云数据有(x,y,z,r)4个维度,r代表点云反射率,论文中将其扩展为9个维度(x, y, z, r, x_c, y_c, z_c, x_p, y_p),带c下标的是柱子中的点相对于柱子中心的偏移位置坐标,带p下标的是点相对于整个大网格中心的全局偏移位置坐标。于是就形成了维度为(D, P, N)的张量, 其中D=9(不过PCDet实现与论文稍有不同,PCDet扩展成D=10), N为每个Pillar的采样点数,P为非空的Pillar数目。
然后就是学习点云特征,用一个简化的PointNet从D维中学出C个channel来得到一个(C, P, N)的张量。在N这个维度上做max pooling operation,得到(C, P)的张量.最后得到(C,H,W)的伪图像.
(2)Backbone
包含两个子网络,一个是自上而下的下采样网络,另一个是上采样网络,具体网络结构可以看本文2.2节。
(3)Detection
检测头使用的是SSD的检测头,关于SSD算法细节可以参考《动手学深度学习》这本书(http://zh.d2l.ai/chapter_computer-vision/ssd.html)。
PointPillars工作原理就介绍这么多,下面将介绍PointPillar工程的整体结构。
2.2 PointPillar工程
参考PCDet,PointPillars各文件组织方式如下,这里暂时只需要对整个工程有个整体印象,后面将逐步完成各文件中的代码:
PCDet
├── data
│ ├── velodyne
│ │ │──000010.bin
├── doc
├── output
├── pcdet
│ ├── config.py
│ ├── datasets
│ │ ├── dataset.py
│ │ ├── __init__.py
│ │ ├── kitti
│ │ │ ├── kitti_dataset.py
│ │ │ └── __pycache__
│ │ │ └── kitti_dataset.cpython-36.pyc
│ │ └── __pycache__
│ │ ├── dataset.cpython-36.pyc
│ │ └── __init__.cpython-36.pyc
│ ├── models
│ │ ├── bbox_heads
│ │ │ ├── anchor_target_assigner.py
│ │ │ ├── __pycache__
│ │ │ │ ├── anchor_target_assigner.cpython-36.pyc
│ │ │ │ └── rpn_head.cpython-36.pyc
│ │ │ └── rpn_head.py
│ │ ├── detectors
│ │ │ ├── detector3d.py
│ │ │ ├── __init__.py
│ │ │ ├── pointpillar.py
│ │ │ └── __pycache__
│ │ │ ├── detector3d.cpython-36.pyc
│ │ │ ├── __init__.cpython-36.pyc
│ │ │ └── pointpillar.cpython-36.pyc
│ │ ├── __init__.py
│ │ ├── model_utils
│ │ │ ├── __init__.py
│ │ │ ├── __pycache__
│ │ │ │ ├── __init__.cpython-36.pyc
│ │ │ │ └── pytorch_utils.cpython-36.pyc
│ │ │ └── pytorch_utils.py
│ │ ├── __pycache__
│ │ │ └── __init__.cpython-36.pyc
│ │ ├── rpn
│ │ │ ├── pillar_scatter.py
│ │ │ └── __pycache__
│ │ │ └── pillar_scatter.cpython-36.pyc
│ │ └── vfe
│ │ ├── __init__.py
│ │ ├── __pycache__
│ │ │ ├── __init__.cpython-36.pyc
│ │ │ └── vfe_utils.cpython-36.pyc
│ │ └── vfe_utils.py
│ ├── ops
│ │ ├── iou3d_nms
│ │ │ ├── build
│ │ │ │ ├── lib.linux-x86_64-3.6
│ │ │ │ │ └── iou3d_nms_cuda.cpython-36m-x86_64-linux-gnu.so
│ │ │ │ └── temp.linux-x86_64-3.6
│ │ │ │ └── src
│ │ │ │ ├── iou3d_nms_kernel.o
│ │ │ │ └── iou3d_nms.o
│ │ │ ├── iou3d_nms_cuda.cpython-36m-x86_64-linux-gnu.so
│ │ │ ├── iou3d_nms.egg-info
│ │ │ │ ├── dependency_links.txt
│ │ │ │ ├── PKG-INFO
│ │ │ │ ├── SOURCES.txt
│ │ │ │ └── top_level.txt
│ │ │ ├── iou3d_nms_utils.py
│ │ │ ├── __pycache__
│ │ │ │ └── iou3d_nms_utils.cpython-36.pyc
│ │ │ ├── setup.py
│ │ │ └── src
│ │ │ ├── iou3d_nms.cpp
│ │ │ └── iou3d_nms_kernel.cu
│ │ └── roiaware_pool3d
│ │ ├── build
│ │ │ ├── lib.linux-x86_64-3.6
│ │ │ │ └── roiaware_pool3d_cuda.cpython-36m-x86_64-linux-gnu.so
│ │ │ └── temp.linux-x86_64-3.6
│ │ │ └── src
│ │ │ ├── roiaware_pool3d_kernel.o
│ │ │ └── roiaware_pool3d.o
│ │ ├── __pycache__
│ │ │ └── roiaware_pool3d_utils.cpython-36.pyc
│ │ ├── roiaware_pool3d_cuda.cpython-36m-x86_64-linux-gnu.so
│ │ ├── roiaware_pool3d.egg-info
│ │ │ ├── dependency_links.txt
│ │ │ ├── PKG-INFO
│ │ │ ├── SOURCES.txt
│ │ │ └── top_level.txt
│ │ ├── roiaware_pool3d_utils.py
│ │ ├── setup.py
│ │ └── src
│ │ ├── roiaware_pool3d.cpp
│ │ └── roiaware_pool3d_kernel.cu
│ ├── __pycache__
│ │ └── config.cpython-36.pyc
│ └── utils
│ ├── box_coder_utils.py
│ ├── box_utils.py
│ ├── common_utils.py
│ └── __pycache__
│ ├── box_coder_utils.cpython-36.pyc
│ ├── box_utils.cpython-36.pyc
│ └── common_utils.cpython-36.pyc
└── tools
├── pointpillar.pth
├── pointpillar.yaml
├── test.py
└── test.sh
下面给出PointPillars的网络结构,主要由3部分组成,网路结构相对也是比较简单的,这可能也是PointPillars为何是KITTI数据集上运算速度最快的原因。

下面是网络的具体结构:
PointPillar(
(vfe): PillarFeatureNetOld2(
(pfn_layers): ModuleList(
(0): PFNLayer(
(linear): Linear(in_features=10, out_features=64, bias=False)
(norm): BatchNorm1d(64, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
)
)
)
(rpn_net): PointPillarsScatter()
(rpn_head): RPNV2(
(blocks): ModuleList(
(0): Sequential(
(0): ZeroPad2d(padding=(1, 1, 1, 1), value=0.0)
(1): Conv2d(64, 64, kernel_size=(3, 3), stride=(2, 2), bias=False)
(2): BatchNorm2d(64, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(3): ReLU()
(4): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(5): BatchNorm2d(64, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(6): ReLU()
(7): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(8): BatchNorm2d(64, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(9): ReLU()
(10): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(11): BatchNorm2d(64, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(12): ReLU()
)
(1): Sequential(
(0): ZeroPad2d(padding=(1, 1, 1, 1), value=0.0)
(1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), bias=False)
(2): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(3): ReLU()
(4): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(5): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(6): ReLU()
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(8): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(9): ReLU()
(10): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(11): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(12): ReLU()
(13): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(14): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(15): ReLU()
(16): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(17): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(18): ReLU()
)
(2): Sequential(
(0): ZeroPad2d(padding=(1, 1, 1, 1), value=0.0)
(1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), bias=False)
(2): BatchNorm2d(256, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(3): ReLU()
(4): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(5): BatchNorm2d(256, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(6): ReLU()
(7): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(8): BatchNorm2d(256, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(9): ReLU()
(10): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(11): BatchNorm2d(256, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(12): ReLU()
(13): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(14): BatchNorm2d(256, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(15): ReLU()
(16): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(17): BatchNorm2d(256, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(18): ReLU()
)
)
(deblocks): ModuleList(
(0): Sequential(
(0): ConvTranspose2d(64, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(2): ReLU()
)
(1): Sequential(
(0): ConvTranspose2d(128, 128, kernel_size=(2, 2), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(2): ReLU()
)
(2): Sequential(
(0): ConvTranspose2d(256, 128, kernel_size=(4, 4), stride=(4, 4), bias=False)
(1): BatchNorm2d(128, eps=0.001, momentum=0.01, affine=True, track_running_stats=True)
(2): ReLU()
)
)
(conv_cls): Conv2d(384, 18, kernel_size=(1, 1), stride=(1, 1))
(conv_box): Conv2d(384, 42, kernel_size=(1, 1), stride=(1, 1))
(conv_dir_cls): Conv2d(384, 12, kernel_size=(1, 1), stride=(1, 1))
)
)
最后,我们看一下PointPillar.yaml配置文件,配置文件存储着网络具体参数,以及训练和测试参数,这在后面的代码编写时会多次用到:
CLASS_NAMES: ['Car', 'Pedestrian', 'Cyclist']
DATA_CONFIG:
DATASET: 'KittiDataset'
DATA_DIR: 'data'
FOV_POINTS_ONLY: True
NUM_POINT_FEATURES: {
'total': 4,
'use': 4
}
POINT_CLOUD_RANGE: [0, -39.68, -3, 69.12, 39.68, 1]
MASK_POINTS_BY_RANGE: True
TRAIN:
INFO_PATH: [
data/kitti_infos_train.pkl
]
SHUFFLE_POINTS: True
MAX_NUMBER_OF_VOXELS: 16000
TEST:
INFO_PATH: [
data/kitti_infos_val.pkl
]
SHUFFLE_POINTS: False
MAX_NUMBER_OF_VOXELS: 40000
AUGMENTATION:
NOISE_PER_OBJECT:
ENABLED: True
GT_LOC_NOISE_STD: [1.0, 1.0, 0.1]
GT_ROT_UNIFORM_NOISE: [-0.78539816, 0.78539816]
NOISE_GLOBAL_SCENE:
ENABLED: True
GLOBAL_ROT_UNIFORM_NOISE: [-0.78539816, 0.78539816]
GLOBAL_SCALING_UNIFORM_NOISE: [0.95, 1.05]
DB_SAMPLER:
ENABLED: True
DB_INFO_PATH: [
data/kitti/kitti_dbinfos_train.pkl
]
PREPARE:
filter_by_difficulty: [-1]
filter_by_min_points: ['Car:5', 'Pedestrian:5', 'Cyclist:5']
RATE: 1.0
SAMPLE_GROUPS: ['Car:15','Pedestrian:10', 'Cyclist:10']
USE_ROAD_PLANE: True
VOXEL_GENERATOR:
MAX_POINTS_PER_VOXEL: 32
VOXEL_SIZE: [0.16, 0.16, 4]
MODEL:
NAME: PointPillar
VFE:
NAME: PillarFeatureNetOld2
ARGS: {
'use_norm': True,
'num_filters': [64],
'with_distance': False,
}
RPN:
PARAMS_FIXED: False # DO NOT USE THIS
BACKBONE:
NAME: PointPillarsScatter
ARGS: {
}
RPN_HEAD:
NAME: RPNV2
DOWNSAMPLE_FACTOR: 8
ARGS: {
'use_norm': True,
'concat_input': False,
'num_input_features': 64,
'layer_nums': [3, 5, 5],
'layer_strides': [2, 2, 2],
'num_filters': [64, 128, 256],
'upsample_strides': [1, 2, 4],
'num_upsample_filters': [128, 128, 128],
'encode_background_as_zeros': True,
'use_direction_classifier': True,
'num_direction_bins': 2,
'dir_offset': 0.78539,
'dir_limit_offset': 0.0,
'use_binary_dir_classifier': False
}
TARGET_CONFIG:
DOWNSAMPLED_FACTOR: 2
BOX_CODER: ResidualCoder
REGION_SIMILARITY_FN: nearest_iou_similarity
SAMPLE_POS_FRACTION: -1.0
SAMPLE_SIZE: 512
ANCHOR_GENERATOR: [
{
'anchor_range': [0, -40.0, -1.78, 70.4, 40.0, -1.78],
'sizes': [[1.6, 3.9, 1.56]],
'rotations': [0, 1.57],
'matched_threshold': 0.6,
'unmatched_threshold': 0.45,
'class_name': 'Car'},
{
'anchor_range': [0, -40, -0.6, 70.4, 40, -0.6],
'sizes': [[0.6, 0.8, 1.73]],
'rotations': [0, 1.57],
'matched_threshold': 0.5,
'unmatched_threshold': 0.35,
'class_name': 'Pedestrian'},
{
'anchor_range': [0, -40, -0.6, 70.4, 40, -0.6],
'sizes': [[0.6, 1.76, 1.73]],
'rotations': [0, 1.57],
'matched_threshold': 0.5,
'unmatched_threshold': 0.35,
'class_name': 'Cyclist'},
]
RCNN:
ENABLED: False
LOSSES:
RPN_REG_LOSS: smooth-l1
LOSS_WEIGHTS: {
'rpn_cls_weight': 1.0,
'rpn_loc_weight': 2.0,
'rpn_dir_weight': 0.2,
'code_weights': [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0]
}
TRAIN:
SPLIT: train
OPTIMIZATION:
OPTIMIZER: adam_onecycle
LR: 0.003
WEIGHT_DECAY: 0.01
MOMENTUM: 0.9
MOMS: [0.95, 0.85]
PCT_START: 0.4
DIV_FACTOR: 10
DECAY_STEP_LIST: [35, 45]
LR_DECAY: 0.1
LR_CLIP: 0.0000001
LR_WARMUP: False
WARMUP_EPOCH: 1
GRAD_NORM_CLIP: 10
TEST:
SPLIT: val
NMS_TYPE: nms_gpu
MULTI_CLASSES_NMS: False
NMS_THRESH: 0.01
SCORE_THRESH: 0.1
USE_RAW_SCORE: True
NMS_PRE_MAXSIZE_LAST: 4096
NMS_POST_MAXSIZE_LAST: 500
RECALL_THRESH_LIST: [0.5, 0.7]
EVAL_METRIC: kitti
BOX_FILTER: {
'USE_IMAGE_AREA_FILTER': True,
'LIMIT_RANGE': [0, -40, -3.0, 70.4, 40, 3.0]
}
我们也可以看看本工程的代码量,总共有2280行代码,其中对于CUDA和C++部分,我们使用PCDet工程中提供的代码,将重点放在Python代码的编写部分。
-------------------------------------------------------------------------------
Language files blank comment code
-------------------------------------------------------------------------------
Python 22 399 875 1183
CUDA 2 156 72 525
C++ 2 92 47 226
Markdown 1 34 0 199
YAML 1 26 0 146
Bourne Shell 1 0 0 1
-------------------------------------------------------------------------------
SUM: 29 707 994 2280
-------------------------------------------------------------------------------
总结:本文首先对3D目标检测研究现状进行了概述,然后介绍了PCDet3D目标检测库,最后对要实现的PointPillars工作原理及其工程进行了介绍。在下一篇文章中我们将开始从头编写代码,一步一步实现3D检测模型。
智能推荐
React学习记录-程序员宅基地
文章浏览阅读936次,点赞22次,收藏26次。React核心基础
Linux查磁盘大小命令,linux系统查看磁盘空间的命令是什么-程序员宅基地
文章浏览阅读2k次。linux系统查看磁盘空间的命令是【df -hl】,该命令可以查看磁盘剩余空间大小。如果要查看每个根路径的分区大小,可以使用【df -h】命令。df命令以磁盘分区为单位查看文件系统。本文操作环境:red hat enterprise linux 6.1系统、thinkpad t480电脑。(学习视频分享:linux视频教程)Linux 查看磁盘空间可以使用 df 和 du 命令。df命令df 以磁..._df -hl
Office & delphi_range[char(96 + acolumn) + inttostr(65536)].end[xl-程序员宅基地
文章浏览阅读923次。uses ComObj;var ExcelApp: OleVariant;implementationprocedure TForm1.Button1Click(Sender: TObject);const // SheetType xlChart = -4109; xlWorksheet = -4167; // WBATemplate xlWBATWorksheet = -4167_range[char(96 + acolumn) + inttostr(65536)].end[xlup]
若依 quartz 定时任务中 service mapper无法注入解决办法_ruoyi-quartz无法引入ruoyi-admin的service-程序员宅基地
文章浏览阅读2.3k次。上图为任务代码,在任务具体执行的方法中使用,一定要写在方法内使用SpringContextUtil.getBean()方法实例化Spring service类下边是ruoyi-quartz模块中util/SpringContextUtil.java(已改写)import org.springframework.beans.BeansException;import org.springframework.context.ApplicationContext;import org.s..._ruoyi-quartz无法引入ruoyi-admin的service
CentOS7配置yum源-程序员宅基地
文章浏览阅读2w次,点赞10次,收藏77次。yum,全称“Yellow dog Updater, Modified”,是一个专门为了解决包的依赖关系而存在的软件包管理器。可以这么说,yum 是改进型的 RPM 软件管理器,它很好的解决了 RPM 所面临的软件包依赖问题。yum 在服务器端存有所有的 RPM 包,并将各个包之间的依赖关系记录在文件中,当管理员使用 yum 安装 RPM 包时,yum 会先从服务器端下载包的依赖性文件,通过分析此文件从服务器端一次性下载所有相关的 RPM 包并进行安装。_centos7配置yum源
智能科学毕设分享(算法) 基于深度学习的抽烟行为检测算法实现(源码分享)-程序员宅基地
文章浏览阅读828次,点赞21次,收藏8次。今天学长向大家分享一个毕业设计项目毕业设计 基于深度学习的抽烟行为检测算法实现(源码分享)毕业设计 深度学习的抽烟行为检测算法实现通过目前应用比较广泛的 Web 开发平台,将模型训练完成的算法模型部署,部署于 Web 平台。并且利用目前流行的前后端技术在该平台进行整合实现运营车辆驾驶员吸烟行为检测系统,方便用户使用。本系统是一种运营车辆驾驶员吸烟行为检测系统,为了降低误检率,对驾驶员视频中的吸烟烟雾和香烟目标分别进行检测,若同时检测到则判定该驾驶员存在吸烟行为。进行流程化处理,以满足用户的需要。
随便推点
STM32单片机示例:多个定时器同步触发启动_stm32 定时器同步-程序员宅基地
文章浏览阅读3.7k次,点赞3次,收藏14次。多个定时器同步触发启动是一种比较实用的功能,这里将对此做个示例说明。_stm32 定时器同步
android launcher分析和修改10,Android Launcher分析和修改9——Launcher启动APP流程(转载)...-程序员宅基地
文章浏览阅读348次。出处 : http://www.cnblogs.com/mythou/p/3187881.html本来想分析AppsCustomizePagedView类,不过今天突然接到一个临时任务。客户反馈说机器界面的图标很难点击启动程序,经常点击了没有反应,Boss说要优先解决这问题。没办法,只能看看是怎么回事。今天分析一下Launcher启动APP的过程。从用户点击到程序启动的流程,下面针对WorkSpa..._回调bubbletextview
Ubuntu 12 最快的两个源 个人感觉 163与cn99最快 ubuntu安装源下包过慢_un.12.cc-程序员宅基地
文章浏览阅读6.2k次。Ubuntu 12 最快的两个源 个人感觉 163与cn99最快 ubuntu下包过慢 1、首先备份Ubuntu 12.04源列表 sudo cp /etc/apt/sources.list /etc/apt/sources.list.backup (备份下当前的源列表,有备无患嘛) 2、修改更新源 sudo gedit /etc/apt/sources.list (打开Ubuntu 12_un.12.cc
vue动态路由(权限设置)_vue动态路由权限-程序员宅基地
文章浏览阅读5.8k次,点赞6次,收藏86次。1.思路(1)动态添加路由肯定用的是addRouter,在哪用?(2)vuex当中获取到菜单,怎样展示到界面2.不管其他先试一下addRouter找到router/index.js文件,内容如下,这是我自己先配置的登录路由现在先不管请求到的菜单是什么样,先写一个固定的菜单通过addRouter添加添加以前注意:addRoutes()添加的是数组在export defult router的上一行图中17行写下以下代码var addRoute=[ { path:"/", name:"_vue动态路由权限
JSTL 之变量赋值标签-程序员宅基地
文章浏览阅读8.9k次。 关键词: JSTL 之变量赋值标签 /* * Author Yachun Miao * Created 11-Dec-06 */关于JSP核心库的set标签赋值变量,有两种方式: 1.日期" />2. 有种需求要把ApplicationResources_zh_CN.prope
VGA带音频转HDMI转换芯片|VGA转HDMI 转换器方案|VGA转HDMI1.4转换器芯片介绍_vga转hdmi带音频转换器,转接头拆解-程序员宅基地
文章浏览阅读3.1k次,点赞3次,收藏2次。1.1ZY5621概述ZY5621是VGA音频到HDMI转换器芯片,它符合HDMI1.4 DV1.0规范。ZY5621也是一款先进的高速转换器,集成了MCU和VGA EDID芯片。它还包含VGA输入指示和仅音频到HDMI功能。进一步降低系统制造成本,简化系统板上的布线。ZY5621方案设计简单,且可以完美还原输入端口的信号,此方案设计广泛应用于投影仪、教育多媒体、视频会议、视频展台、工业级主板显示、手持便携设备、转换盒、转换线材等产品设计上面。1.2 ZY5621 特性内置MCU嵌入式VGA_vga转hdmi带音频转换器,转接头拆解