基于深度学习的驾驶行为检测(玩手机) 毕业设计_玩手机数据集-程序员宅基地
技术标签: python
0 简介
今天学长向大家分享一个毕业设计项目
毕业设计 基于深度学习的驾驶行为检测(玩手机)
项目运行效果:
毕业设计 深度学习的驾驶行为检测(玩手机)
项目获取:
https://gitee.com/sinonfin/algorithm-sharing
1 系统设计原则
为了使本次设计的吸烟检测系统具有更好的实用性、准确性和稳定性,同时能够让相关操作人员在使用时感受到便捷并且容易上手,在设计本系统时,主要遵循了以下五项基本原则:
(1)规范性原则:
在系统开发的过程当中所用到的控制协议、传输协议,编码类型等都应该符合国家标准和行业标准。在代码撰写时,应该符合一般的技术规范。
(2)模块化设计原则
模块化设计是指在系统设计时,尽可能的将多个基本功能设计为多个独立运行的模块,并且每一个模块只负责一件事情。这样就可以让系统结构更加清晰,同时在实际的运行过程中可以实现不同模块之间的调用,大大增加了系统的灵活性。这样做既可以用有限的模块来最大限度的完成用户的要求,同时对系统后期的维护以及功能的增加都非常有利。
(3)可操作性与可维护性原则
一个好的系统应该具有很好的可操作性,所以在符合用户使用习惯的基础上,对每一个具体操作进行简化。同时,为了使系统可以更加便于维护,在系统设计的过程当中,应该提前想清楚各个功能模块之间的难点与逻辑,这样才能在日后的维护当中减少工作量。
(4)可拓展性原则
系统开发将多个基本功能尽可能的设计为多个独立运行的模块,大大增加了系统的可拓展性。与此同时,开发过程当中,前端和后端的功能是分开进行的,通过提前设计好的可供数据传输的接口,以 JSON 数据格式在各个模块之间进行数据交换操作,使前后端之间具有解耦关系,这样做可以保证了系统具有比较良好的可扩展能力和稳定能力。
(5)经济性原则
在系统设计的时候,首先是要考虑用户的具体需求,设计实用的功能,发挥系统的最大性能。但是在满足用户所需的功能后,也应该尽可能的减少开发成本,采用更加经济的技术设备,不能只是一味地追求更高级更复杂的设计

玩手机检测结果可视化:


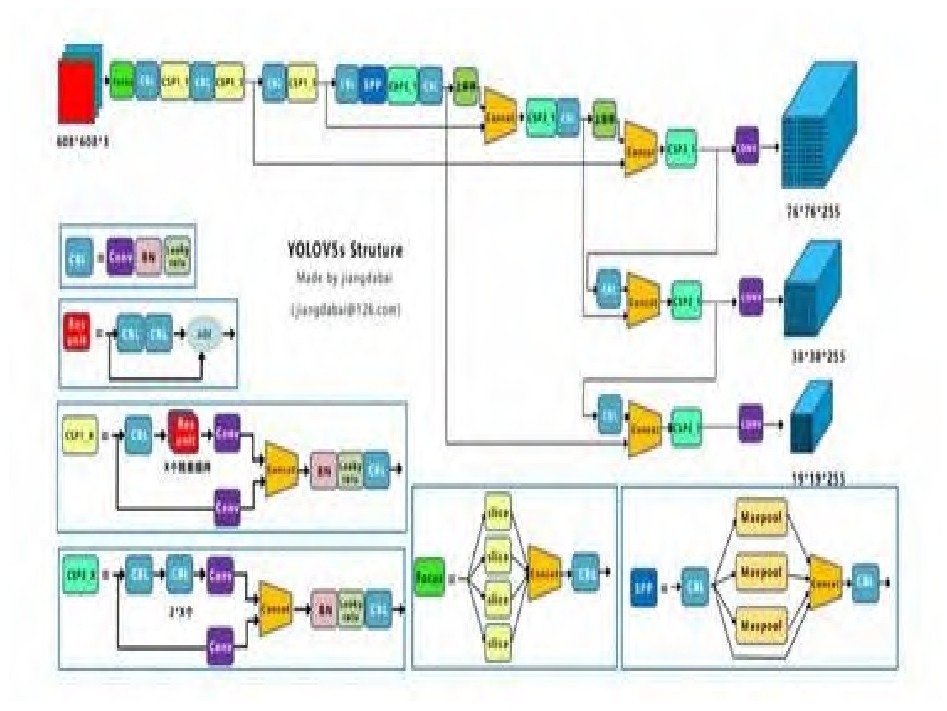
2 Yolov5算法
4.1 简介
YOLO系列是基于深度学习的回归方法。该系列陆续诞生出YOLOv1、YOLOv2、YOLOv3、YOLOv4、YOLOv5。YOLOv5算法,它是一种单阶段目标检测的算法,该算法可以根据落地要求灵活地通过chaneel和layer的控制因子来配置和调节模型,所以在比赛和落地中应用比较多。同时它有YOLOv5x、YOLOv5l、YOLOv5m、YOLOv5s四种模型。
具有以下优点:
- 在pytorch环境下编写;
- 可以很容易编译成ON⁃NX和Core ML;
- 运行速度很快,每秒可以达到140FPS的速度;
- 模型精度高;
- 集成了YOLOv3和YOLOv4的部分优秀特性,进行了推陈出新的改进。
2.2 相关技术
Mosaic数据增强
Mosaic数据增强技术采用了四张图片的随机缩放、随机剪裁、随机排布的方式对数据进行拼接,相比CutMix数据增强多用了两张图片。在目标识别过程中,要识别的目标有大目标、中等目标、小目标,并且三种目标的占比例不均衡,其中,小目标的数量是最多的,但是出现的频率很低,这种情况就会导致在bp时对小目标的优化不足,模型正确识别小目标的难度比识别中、大目标的难度要大很多,于是对于小目标来说很容易出现误检和漏检的情况。Mosaic数据增强技术做出改进后,上述的问题得到有效的解决。
该技术的优点是:
- 丰富了数据集,采用“三个随机”的方式对数据进行拼接丰富了检测的数据集,尤其是随机缩放增加了很多小目标,克服了小目标的不足,让网络的鲁棒性得到提高;
- 减少GPU的使用,在Mosaic增强训练时,四张图片拼接在一起,GPU可以直接计算四张图片的数据,让Mini-batch的大小减少了很多,这使得一个GPU就可以达到比较可观的效果。
自适应anchor
自适应anchor是check_anchors函数通过遗传算法与Kmeans迭代算出的最大可能召回率的anchor组合。在网络模型的训练过程中,网络在初始化的锚框的基础上输出预测框,然后与真实框groundtruth进行对比,计算两个框之间的差值,再根据差值进行反向更新,迭代网络参数,最后求出最佳的锚框值。自适应的anchor能够更好地配合网络训练,提高模型的精度,减少对anchor的设计难度,具有很好的实用性。
自适应图片缩放
为了提高模型的推理速度,YOLOv5提出自适应图片缩放,根据长宽比对图像进行缩放,并添加最少的黑边,减少计算量。该方法是用缩放后的长边减去短边再对32进行取余运算,求出padding。在训练时并没有采用缩减黑边的方法,该方法只是在测试模型推理的时候才使用,这样提高了目标检测的准确率和速度。
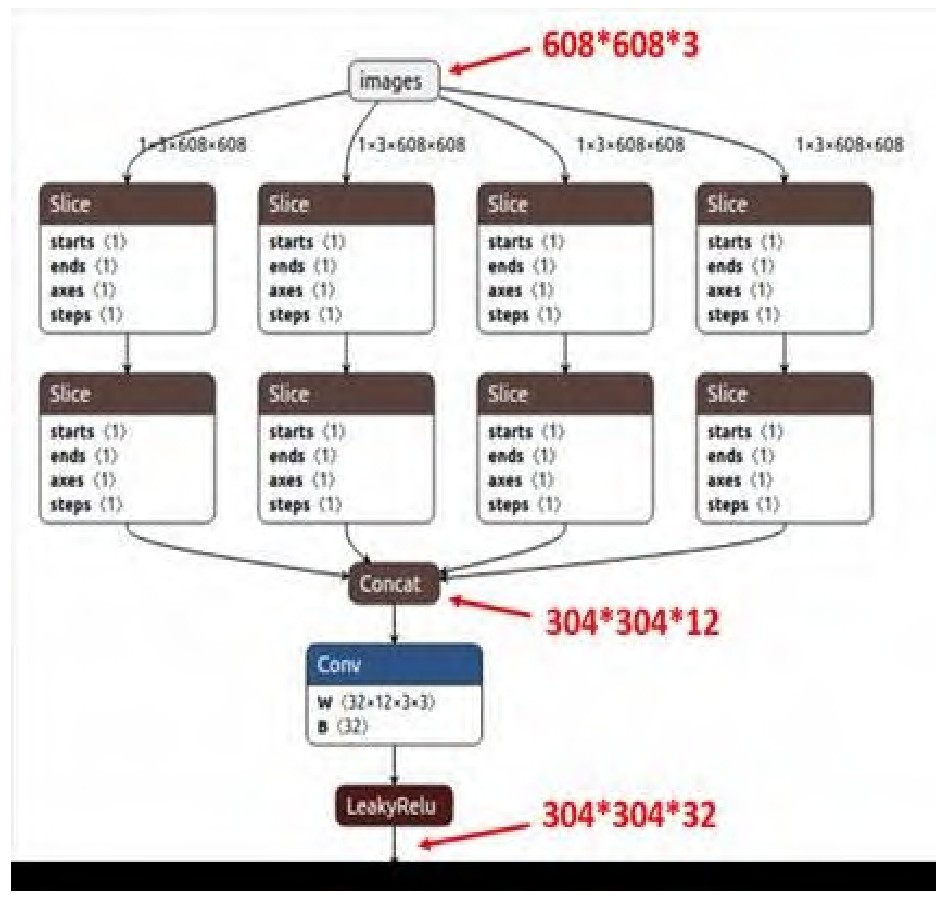
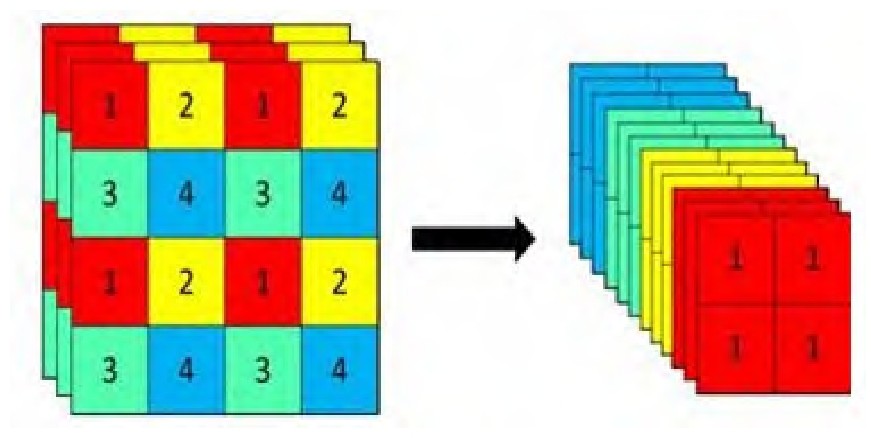
Focus结构
该结构采用切片操作,将特征切片成四份,每一份将当成下采样的特征,然后在channel维度进行concat。例如:原始6086083的数据图片,经过切片操作先变成30430412的特征图,再经过一次32个卷积核的卷积操作,变成30430432的特征图。
CSP结构
YOLOv5中的CSP[5]结构应用于两处,一处是CSP1_X结构应用于Backbone的主干网络中,另一处的CSP2_X结构应用于Neck中,用于加强网络的特征融合的能力。CSPNet主要从网络结构设计的角度解决推理中从计算量很大的问题。该结构的优点有:1)增强CNN的学习能力,使得模型在轻量化的同时保持较高的准确性;2)减低计算的瓶颈问题;3)减低内存的分险。
PFN+PAN结构
这个结构是FPN和PAN的联合。FPN是自顶向下的,将高层的特征信息通过上采样的方式进行传递融合,得到进行预测的特征图,而PAN正好与FPN的方向是相反的方向,它是自底向上地采取特征信息。两个结构各自从不同的主干层对不同的检测层进行参数聚合。两个结构的强强联合让得到的特征图的特征更加明显和清楚。
Bounding box的损失函数
Bounding box损失函数[6]增加了相交尺度的衡量方式,有效缓解了当两个框不相交和两个框大小完全相同的两种特殊情况。因为当预测框和目标框不相交时,IOU=0,无法反应两个框距离的远近的时候,此时的损失函数不可导;两个框大小完全相同,两个IOU也相同,IOU_LOSS无法区分以上两种特殊情况。
nms非极大值抑制
在目标检测过程的后续处理中,对于大量的目标框的筛选问题,通常会进行nms操作,以此来达到一个不错的效果。YO⁃LOv5算法同样采用了加权的nms操作。
3 数据集处理及实验
数据集准备
由于目前针对吸烟图片并没有现成的数据集,我们使用Python爬虫利用关键字在互联网上获得的图片数据,编写程序爬了1w张,筛选下来有近1000张可用,以及其他途径获取到的,暂时可用数据集有5k张,
深度学习图像标注软件众多,按照不同分类标准有多中类型,本文使用LabelImg单机标注软件进行标注。LabelImg是基于角点的标注方式产生边界框,对图片进行标注得到xml格式的标注文件,由于边界框对检测精度的影响较大因此采用手动标注,并没有使用自动标注软件。
考虑到有的朋友时间不足,博主提供了标注好的数据集和训练好的模型,需要请联系。
数据标注简介
通过pip指令即可安装
pip install labelimg
在命令行中输入labelimg即可打开

4 部分核心代码
# data/smoke.yaml
# COCO 2017 dataset http://cocodataset.org
# Download command: bash yolov5/data/get_coco2017.sh
# Train command: python train.py --data ./data/coco.yaml
# Dataset should be placed next to yolov5 folder:
# /parent_folder
# /coco
# /yolov5
# train and val datasets (image directory or *.txt file with image paths)
train: data\train.txt # 上面我们生成的train,根据自己的路径进行更改
val: data\test.txt # 上面我们生成的test
#test: ../coco/test-dev2017.txt # 20k images for submission to https://competitions.codalab.org/competitions/20794
# number of classes
nc: 1 #训练的类别
# class names
names: ['smoke']
# Print classes
# with open('data/coco.yaml') as f:
# d = yaml.load(f, Loader=yaml.FullLoader) # dict
# for i, x in enumerate(d['names']):
# print(i, x)
# model/yolov5s.yaml
# parameters
nc: 1 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
# anchors
anchors:
- [116,90, 156,198, 373,326] # P5/32
- [30,61, 62,45, 59,119] # P4/16
- [10,13, 16,30, 33,23] # P3/8
# YOLOv5 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, BottleneckCSP, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 9, BottleneckCSP, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, BottleneckCSP, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
]
# YOLOv5 head
head:
[[-1, 3, BottleneckCSP, [1024, False]], # 9
[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, BottleneckCSP, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, BottleneckCSP, [256, False]],
[-1, 1, nn.Conv2d, [na * (nc + 5), 1, 1]], # 18 (P3/8-small)
[-2, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, BottleneckCSP, [512, False]],
[-1, 1, nn.Conv2d, [na * (nc + 5), 1, 1]], # 22 (P4/16-medium)
[-2, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, BottleneckCSP, [1024, False]],
[-1, 1, nn.Conv2d, [na * (nc + 5), 1, 1]], # 26 (P5/32-large)
[[], 1, Detect, [nc, anchors]], # Detect(P5, P4, P3)
]
# 训练部分主函数
if __name__ == '__main__':
check_git_status()
parser = argparse.ArgumentParser()
parser.add_argument('--epochs', type=int, default=300)
parser.add_argument('--batch-size', type=int, default=16)
parser.add_argument('--cfg', type=str, default='models/yolov5s.yaml', help='*.cfg path')
parser.add_argument('--data', type=str, default='data/smoke.yaml', help='*.data path')
parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='train,test sizes')
parser.add_argument('--rect', action='store_true', help='rectangular training')
parser.add_argument('--resume', action='store_true', help='resume training from last.pt')
parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
parser.add_argument('--notest', action='store_true', help='only test final epoch')
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
parser.add_argument('--weights', type=str, default='', help='initial weights path')
parser.add_argument('--name', default='', help='renames results.txt to results_name.txt if supplied')
parser.add_argument('--device', default='0', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--adam', action='store_true', help='use adam optimizer')
parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%')
parser.add_argument('--single-cls', action='store_true', help='train as single-class dataset')
opt = parser.parse_args()
opt.weights = last if opt.resume else opt.weights
opt.cfg = check_file(opt.cfg) # check file
opt.data = check_file(opt.data) # check file
print(opt)
opt.img_size.extend([opt.img_size[-1]] * (2 - len(opt.img_size))) # extend to 2 sizes (train, test)
device = torch_utils.select_device(opt.device, apex=mixed_precision, batch_size=opt.batch_size)
if device.type == 'cpu':
mixed_precision = False
# Train
if not opt.evolve:
tb_writer = SummaryWriter(comment=opt.name)
print('Start Tensorboard with "tensorboard --logdir=runs", view at http://localhost:6006/')
train(hyp)
# Evolve hyperparameters (optional)
else:
tb_writer = None
opt.notest, opt.nosave = True, True # only test/save final epoch
if opt.bucket:
os.system('gsutil cp gs://%s/evolve.txt .' % opt.bucket) # download evolve.txt if exists
for _ in range(10): # generations to evolve
if os.path.exists('evolve.txt'): # if evolve.txt exists: select best hyps and mutate
# Select parent(s)
parent = 'single' # parent selection method: 'single' or 'weighted'
x = np.loadtxt('evolve.txt', ndmin=2)
n = min(5, len(x)) # number of previous results to consider
x = x[np.argsort(-fitness(x))][:n] # top n mutations
w = fitness(x) - fitness(x).min() # weights
if parent == 'single' or len(x) == 1:
# x = x[random.randint(0, n - 1)] # random selection
x = x[random.choices(range(n), weights=w)[0]] # weighted selection
elif parent == 'weighted':
x = (x * w.reshape(n, 1)).sum(0) / w.sum() # weighted combination
# Mutate
mp, s = 0.9, 0.2 # mutation probability, sigma
npr = np.random
npr.seed(int(time.time()))
g = np.array([1, 1, 1, 1, 1, 1, 1, 0, .1, 1, 0, 1, 1, 1, 1, 1, 1, 1]) # gains
ng = len(g)
v = np.ones(ng)
while all(v == 1): # mutate until a change occurs (prevent duplicates)
v = (g * (npr.random(ng) < mp) * npr.randn(ng) * npr.random() * s + 1).clip(0.3, 3.0)
for i, k in enumerate(hyp.keys()): # plt.hist(v.ravel(), 300)
hyp[k] = x[i + 7] * v[i] # mutate
# Clip to limits
keys = ['lr0', 'iou_t', 'momentum', 'weight_decay', 'hsv_s', 'hsv_v', 'translate', 'scale', 'fl_gamma']
limits = [(1e-5, 1e-2), (0.00, 0.70), (0.60, 0.98), (0, 0.001), (0, .9), (0, .9), (0, .9), (0, .9), (0, 3)]
for k, v in zip(keys, limits):
hyp[k] = np.clip(hyp[k], v[0], v[1])
# Train mutation
results = train(hyp.copy())
# Write mutation results
print_mutation(hyp, results, opt.bucket)
# Plot results
# plot_evolution_results(hyp)
项目运行效果:
毕业设计 深度学习的驾驶行为检测(玩手机)
最后
项目获取:
智能推荐
使用nginx解决浏览器跨域问题_nginx不停的xhr-程序员宅基地
文章浏览阅读1k次。通过使用ajax方法跨域请求是浏览器所不允许的,浏览器出于安全考虑是禁止的。警告信息如下:不过jQuery对跨域问题也有解决方案,使用jsonp的方式解决,方法如下:$.ajax({ async:false, url: 'http://www.mysite.com/demo.do', // 跨域URL ty..._nginx不停的xhr
在 Oracle 中配置 extproc 以访问 ST_Geometry-程序员宅基地
文章浏览阅读2k次。关于在 Oracle 中配置 extproc 以访问 ST_Geometry,也就是我们所说的 使用空间SQL 的方法,官方文档链接如下。http://desktop.arcgis.com/zh-cn/arcmap/latest/manage-data/gdbs-in-oracle/configure-oracle-extproc.htm其实简单总结一下,主要就分为以下几个步骤。..._extproc
Linux C++ gbk转为utf-8_linux c++ gbk->utf8-程序员宅基地
文章浏览阅读1.5w次。linux下没有上面的两个函数,需要使用函数 mbstowcs和wcstombsmbstowcs将多字节编码转换为宽字节编码wcstombs将宽字节编码转换为多字节编码这两个函数,转换过程中受到系统编码类型的影响,需要通过设置来设定转换前和转换后的编码类型。通过函数setlocale进行系统编码的设置。linux下输入命名locale -a查看系统支持的编码_linux c++ gbk->utf8
IMP-00009: 导出文件异常结束-程序员宅基地
文章浏览阅读750次。今天准备从生产库向测试库进行数据导入,结果在imp导入的时候遇到“ IMP-00009:导出文件异常结束” 错误,google一下,发现可能有如下原因导致imp的数据太大,没有写buffer和commit两个数据库字符集不同从低版本exp的dmp文件,向高版本imp导出的dmp文件出错传输dmp文件时,文件损坏解决办法:imp时指定..._imp-00009导出文件异常结束
python程序员需要深入掌握的技能_Python用数据说明程序员需要掌握的技能-程序员宅基地
文章浏览阅读143次。当下是一个大数据的时代,各个行业都离不开数据的支持。因此,网络爬虫就应运而生。网络爬虫当下最为火热的是Python,Python开发爬虫相对简单,而且功能库相当完善,力压众多开发语言。本次教程我们爬取前程无忧的招聘信息来分析Python程序员需要掌握那些编程技术。首先在谷歌浏览器打开前程无忧的首页,按F12打开浏览器的开发者工具。浏览器开发者工具是用于捕捉网站的请求信息,通过分析请求信息可以了解请..._初级python程序员能力要求
Spring @Service生成bean名称的规则(当类的名字是以两个或以上的大写字母开头的话,bean的名字会与类名保持一致)_@service beanname-程序员宅基地
文章浏览阅读7.6k次,点赞2次,收藏6次。@Service标注的bean,类名:ABDemoService查看源码后发现,原来是经过一个特殊处理:当类的名字是以两个或以上的大写字母开头的话,bean的名字会与类名保持一致public class AnnotationBeanNameGenerator implements BeanNameGenerator { private static final String C..._@service beanname
随便推点
二叉树的各种创建方法_二叉树的建立-程序员宅基地
文章浏览阅读6.9w次,点赞73次,收藏463次。1.前序创建#include<stdio.h>#include<string.h>#include<stdlib.h>#include<malloc.h>#include<iostream>#include<stack>#include<queue>using namespace std;typed_二叉树的建立
解决asp.net导出excel时中文文件名乱码_asp.net utf8 导出中文字符乱码-程序员宅基地
文章浏览阅读7.1k次。在Asp.net上使用Excel导出功能,如果文件名出现中文,便会以乱码视之。 解决方法: fileName = HttpUtility.UrlEncode(fileName, System.Text.Encoding.UTF8);_asp.net utf8 导出中文字符乱码
笔记-编译原理-实验一-词法分析器设计_对pl/0作以下修改扩充。增加单词-程序员宅基地
文章浏览阅读2.1k次,点赞4次,收藏23次。第一次实验 词法分析实验报告设计思想词法分析的主要任务是根据文法的词汇表以及对应约定的编码进行一定的识别,找出文件中所有的合法的单词,并给出一定的信息作为最后的结果,用于后续语法分析程序的使用;本实验针对 PL/0 语言 的文法、词汇表编写一个词法分析程序,对于每个单词根据词汇表输出: (单词种类, 单词的值) 二元对。词汇表:种别编码单词符号助记符0beginb..._对pl/0作以下修改扩充。增加单词
android adb shell 权限,android adb shell权限被拒绝-程序员宅基地
文章浏览阅读773次。我在使用adb.exe时遇到了麻烦.我想使用与bash相同的adb.exe shell提示符,所以我决定更改默认的bash二进制文件(当然二进制文件是交叉编译的,一切都很完美)更改bash二进制文件遵循以下顺序> adb remount> adb push bash / system / bin /> adb shell> cd / system / bin> chm..._adb shell mv 权限
投影仪-相机标定_相机-投影仪标定-程序员宅基地
文章浏览阅读6.8k次,点赞12次,收藏125次。1. 单目相机标定引言相机标定已经研究多年,标定的算法可以分为基于摄影测量的标定和自标定。其中,应用最为广泛的还是张正友标定法。这是一种简单灵活、高鲁棒性、低成本的相机标定算法。仅需要一台相机和一块平面标定板构建相机标定系统,在标定过程中,相机拍摄多个角度下(至少两个角度,推荐10~20个角度)的标定板图像(相机和标定板都可以移动),即可对相机的内外参数进行标定。下面介绍张氏标定法(以下也这么称呼)的原理。原理相机模型和单应矩阵相机标定,就是对相机的内外参数进行计算的过程,从而得到物体到图像的投影_相机-投影仪标定
Wayland架构、渲染、硬件支持-程序员宅基地
文章浏览阅读2.2k次。文章目录Wayland 架构Wayland 渲染Wayland的 硬件支持简 述: 翻译一篇关于和 wayland 有关的技术文章, 其英文标题为Wayland Architecture .Wayland 架构若是想要更好的理解 Wayland 架构及其与 X (X11 or X Window System) 结构;一种很好的方法是将事件从输入设备就开始跟踪, 查看期间所有的屏幕上出现的变化。这就是我们现在对 X 的理解。 内核是从一个输入设备中获取一个事件,并通过 evdev 输入_wayland