faster rcnn解读【原理篇】-程序员宅基地
技术标签: 《deep learning for computer vi
看了DL4CV的第三卷的15章faster rcnn之后,收获很多,特此做一下记录
一.RCNN

RCNN一共分为四步:
step1:输入图片
step2:采用selective search的方法获取潜在的roi,一共提取了2000个潜在roi,然后放入conv当中进行训练
step3:使用迁移学习【用到了conv层】方法,提取step2的特征,从而获得最终的roi
step4:使用SVM来进行物体分类
注:
RCNN算法使用了selective search用来提取潜在的roi区域,而非使用sliding window+图像金字塔的方法,也就是:seletive search是智能版的sliding window。
二.fast rcnn

fast rcnn一共分为四步:
step1:输入图片+ground truth
step2:提取图像特征,使用selective search的方法来进行提取潜在roi区域,将结果传入step 3
step3:通过roi pooling 来获取最终的roi区域。使用roi pooling层之后的结果是一个固定大小的roi 区域{ 这个收到了SPPnet的启发,通过引入金字塔池化通过max pooling固定了roi区域,从而不需要将图片resize成为固定大小再去训练}
step4:将step3的输出,作为step4的输入,分为两个部分。第一部分用于分类,第二部分用于定位检测
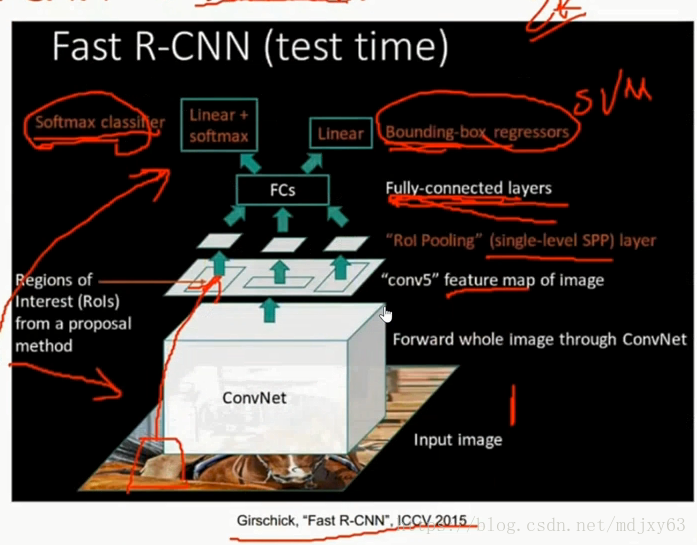
注:fast rcnn相比于rcnn有2个贡献:
1)第一次使用end to end结构进行检测,具体体现在:最终的输出:分为两个部分。第一部分用于分类,【得益于引入了全连接层】,第二部分用于定位检测
2)引入了roi pooling层,使得roi 区域的大小固定
3)与rcnn不同的是:fast rcnn先进行conv层,然后再进行selective search提取潜在roi,而rcnn先使用selective search提取出2000个潜在roi,然后再送人conv中,这样速度就慢很多
三.faster rcnn
因为fast rcnn使用了selective search的方法,因此检测速度取决于selective search的效率,所以faster rcnn的唯一的贡献是,使用RPN layer来代替selective search,大大的提高了region proposal的效率。
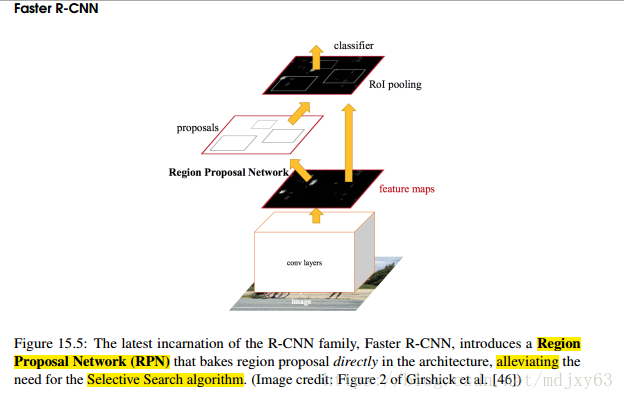
RPN仅仅是定位物体潜在区域,并不会输出该区域的类别,是确定roi区域的stage1。输出是物体的概率值,用来做二分类【前景和背景】,如果被认为是背景,直接被过滤掉,如果是前景,那么继续放入到roi pooling当中
roi pooling层,用来精细化roi区域位置,是确定roi区域的第二阶段,也是最后一步,然后将roi区域作为输入分别放到分类+定位两个分支
=======================================================================
参考这篇文章:https://www.cnblogs.com/hellocwh/p/8671029.html
Faster RCNN在Fast RCNN上更进一步,将Region Proposal也用神经网络来做,如果说Fast RCNN的最大贡献是ROI pooling layer和Multi task,那么RPN(Region Proposal Networks)就是Faster RCNN的最大亮点了。使用RPN产生的proposals比selective search要少很多(300vs2000)候选框要少很多,计算量大大减少,因此也一定程度上减少了后面detection的计算量。
Introduction
Fast RCNN之后,detection的计算瓶颈就卡在了Region Proposal上。一个重要原因就是,Region Proposal是用CPU算的,但是直接将其用GPU实现一遍也有问题,许多提取规则其实是可以重用的,因此有必要找一种能够共享算力的GPU版Region Proposal。
Faster RCNN则是专门训练了一个卷积神经网络来回归bounding box,从而代替region proposal。这个网络完全由卷积操作实现,并且引入anchor以应对对象形状尺寸各异的问题,测试速度与Fast RCNN相比速度极快。
这个网络叫做region proposal layer.
RPN

训练数据就是图片和bounding box
- 输入任意尺寸的图片,缩放到(800×600)作为输入
- 输入到一个基础卷积神经网络,比如ZF或者VGG,以ZF为例,得到一个51×39的feature map
- 用一个小的网络在feature map上滑窗,算每个3x3窗口的feature,输出一个长度为256的向量,这个操作很自然就是用3×3卷积来实现,于是可以得到一个51×39×256的feature map
-
每个256向量跟feature map上一个3×3窗口对应,也跟800×600的原图上9个区域相对应,具体讲一下这个9个区域:
- 卷积后feature map上的每个3x3的区域对应原图上一个比较大的感受野,用ZF做前面的卷积层,感受野为171×171,用VGG感受野为228×228
- 我们想用feature map来判断它的感受野是否是前景,但是对象并不总是正方形的(因此我们需要将128,256,512;分别与1:1,1:2,2:1做3*3的anchor,生成不同比例的前景区域),于是我们需要对感受野做一个替换
- 我们让每个3x3的区域(图中橙色方格【window3*3】)和原图上九个区域相对应,这九个区域的中心(灰色方格)就是3x3对应原图区域的中心
- 九个区域有九种尺寸分别是
128x128 128x64 64x128
256x256 256x128 128x256
512x512 512x256 256x512- 这九个区域我们也称为9个anchor,或者9个reference box
- 如此,每个特征就能和原图上形状和尺寸各异的区域对应起来了
- 回到刚刚的256向量,将这个向量输入一个FC,得到2x9个输出【上图右半部分的橙色部分】,代表9个anchor为前景还是背景的概率
- 学习用的标签设置:如果anchor与真实bounding box重叠率大于0.7,就当做是前景,如果小于0.3,就当做背景
- 将256向量输入另一个FC,得到4x9个输出,代表9个anchor的修正后的位置信息(x,y,w,h)【上图右半部分的蓝色区域】
- 学习用的标签就是真实的bounding box,用的还是之前Faster RCNN的bounding box regression
两个FC在实现的时候是分别用两个1x1卷积实现的
以橙色为例,256向量和W1矩阵相乘,得到长度为18的向量,这样的操作在51x39个feature都要做一遍,实现起来就很自然变成了用一个1x1的卷积核在feature map上做卷积啦,这样也暗含了一个假设,不同位置的slide window对于anchor的偏好是相同的,是一个参数数量与精度的权衡问题。

- 于是我们会得到图片上51x39x9≈20K个anchor为前景的概率【背景过滤掉了】,以及修正后的位置
上面这个过程可以完全独立地训练,得到一个很好的Region Proposal Network
理论上我们可以用上面这个流程去训练RPN,但训练RPN的时候,一个batch会直接跑20K个anchor开销太大了。
- 因此每个batch是采一张图里的256个anchor来训练全连接层和卷积层;
- 这256个anchor里正负样本比例为1:1,正样本128个,负样本128个,
- 如果正样本不足128个,用负样本填充,这也意味着并非所有的背景anchor都会拿来训练RPN,因为前景的anchor会远少于背景的anchor,丢掉一些背景anchor才能保证样本平衡。
- 具体实现上,先算所有anchor,再算所有anchor与bounding box的重叠率,然后选择batch中的256个anchor,参与训练。同一张图会多次参与训练,直到图中的正anchor用完。【每次训练,同一张图用不同的256个anchor进行训练】
因此最终的一个mini batch的训练损失函数为:

其中,
- pi是一个batch中的多个anchor属于前景/后景的预测概率向量,ti是一个batch中正anchor对应的bounding box位置向量
- Lcls是softmax二分类损失【前景和背景】
- Lreg跟Fast RCNN中的bounding box regression loss一样,乘一个pi*,意味着只有前景计算bounding box regression loss
- 论文中说Ncls为256,也就是mini-batch size,Nreg约为256*9=2304(论文中说约等于2400),这意味着一对p对应9个t,这种对应关系也体现在全连接层的输出个数上,由于两个task输出数量差别比较大,所以要做一下归一化。
但这就意味着loss中的mini-batch size是以3x3的slide window为单位的,因为只有slide window和anchor的个数才有这种1:9的关系,而挑选训练样本讲的mini-batch size却是以anchor为单位的,所以我猜实际操作是这样的:
- 先选256个anchor,
- 然后找它们对应的256个slide window,
- 然后再算这256个slide window对应的256×9个anchor的loss,每个slide window对应一个256特征,有一个Lcls,同时对应9个anchor,有9个Lreg
论文这里讲得超级混乱:

Proposal layer
其实这也可以算是RPN的一部分,不过这部分不需要训练,所以单独拉出来讲
- 接下来我们会进入一个proposal layer,根据前面得到的这些信息,挑选region给后面的fast rcnn训练
- 图片输入RPN后,我们手头的信息:anchor,anchor score,anchor location to fix
- 用全连接层的位置修正结果修正anchor位置
- 将修正后的anchor按照前景概率从高到底排序,取前6000个
- 边缘的anchor可能超出原图的范围,将严重超出边缘的anchor过滤掉

- 对anchor做非极大抑制,跟RCNN一样的操作
- 再次将剩下的anchor按照anchor score从高到低排序(仍然可能有背景anchor的),取前300个作为proposals输出,如果不足300个就…也没啥关系,比如只有100个就100个来用,其实不足300个的情况很少的,你想Selective Search都有2000个。
Fast RCNN
接下来就是按照Fast RCNN的模式来训练了,我们可以为每张图前向传播从proposal_layer出来得到300个proposals,然后
- 取一张图的128个proposal作为样本,一张图可以取多次,直到proposal用完

- 喂给Fast RCNN做分类和bounding box回归,这里跟RPN很像,但又有所不同,
- BB regressor:拟合proposal和bounding box,而非拟合anchor和bounding box
- Classifier:Object多分类,而非前景背景二分类
迭代训练
RPN和Fast RCNN其实是很像的,因此可以一定程度上共享初始权重,实际训练顺序如下(MATLAB版):
- 先用ImageNet pretrain ZF或VGG
- 训练RPN
- 用RPN得到的proposal去训练Fast RCNN
- 用Fast RCNN训练得到的网络去初始化RPN
- 冻结RPN与Fast RCNN共享的卷积层,Fine tune RPN
- 冻结RPN与Fast RCNN共享的卷积层,Fine tune Fast RCNN
论文中还简单讲了一下另外两种方法:
- 将整个网络合起来一块训练,而不分步,但由于一开始训练时RPN还不稳定,所以训练Fast RCNN用的proposal是固定的anchor,最后效果差不多,训练速度也快。

- 整个网络合起来一起训练,不分步,训练Fast RCNN用的proposals是RPN修正后的anchor,但这种动态的proposal数量不好处理,用的是一种RoI warping layer来解决,这又是另一篇论文的东西了。
SUMMARY
网络结构和训练过程都介绍完了,实验效果也是依样画葫芦,就不再介绍了,整体来说,Faster RCNN这篇论文写得很乱,很多重要的细节都要去看代码才能知道是怎么回事,得亏是效果好才能中NIPS。。
=========================
mask rcnn提出了roi align,效果比roi pooling要好,因为roi pooling取了两次整数,损失精度
http://blog.leanote.com/post/afanti/b5f4f526490b
===================================
这里参考两张图,对于faster rcnn的网络结构写的很清楚,代码参考陈云的simple faster rcnn
转载自:https://www.cnblogs.com/king-lps/p/8981222.html
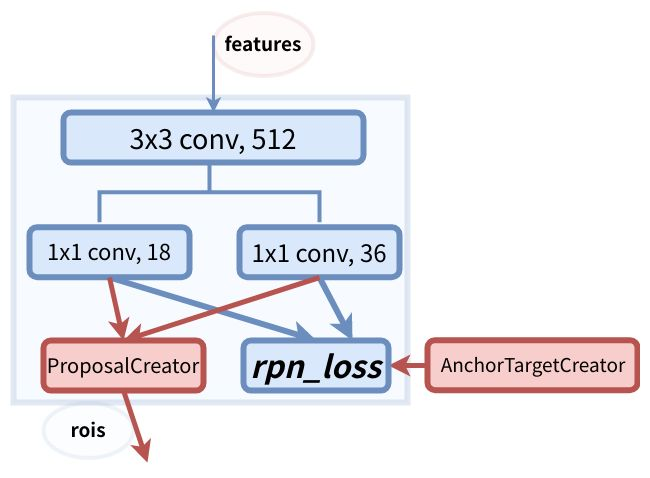
流程说明:features是vgg的conv5_3进行特征提取,然后经过3*3的conv转化一下channel,然后进行分支,9*2=18表示9个anchor的正负样本cls.9*4=36表示9个anchor的坐标。AnchorTargetCreator传入gt_bbox,anchor通过与gt_bbox进行iou计算,输出256个正负样本的gt_rpn_loc,gt_rpn_label:,与上面的1*1conv产生的预测值一起计算rpn_loss。ProposalCreator将20k个anchor经过iou筛选之后剩余2k个anchor,在经过坐标变换之后生成2k个roi
ps:这里正样本表示max iou>=0.7的区域[label=1],负样本表示max iou <=0.3的区域[label=0],还有一个类别是背景,label=-1
详见AnchorTargetCreator的前向传播函数
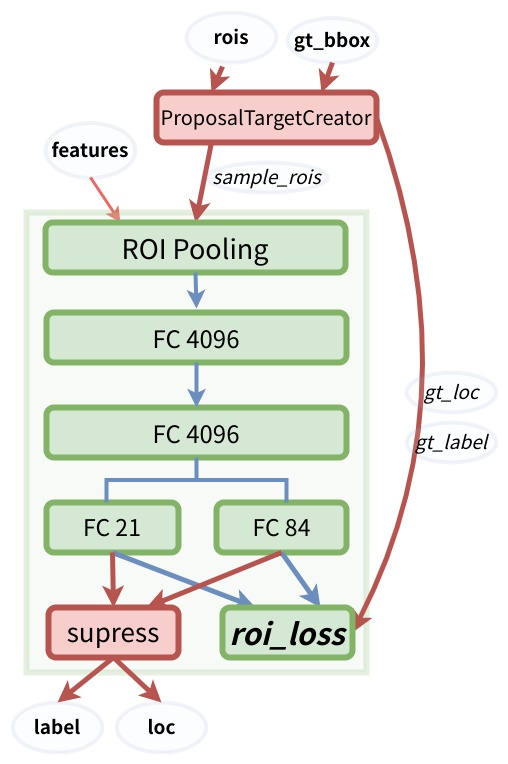
rois是ProposalCreator生成的,gt_bbox是原图的gt,经过ProposalTargetCreator之后,生成gt_loc,gt_label,以及2k个roi,将2k个roi筛选为128个sample rois.128个sample rois结合features传入roi pooling。gt_loc与gt_label,结合后面的FC层的预测结果,产生roi_loss
智能推荐
从零开始搭建Hadoop_创建一个hadoop项目-程序员宅基地
文章浏览阅读331次。第一部分:准备工作1 安装虚拟机2 安装centos73 安装JDK以上三步是准备工作,至此已经完成一台已安装JDK的主机第二部分:准备3台虚拟机以下所有工作最好都在root权限下操作1 克隆上面已经有一台虚拟机了,现在对master进行克隆,克隆出另外2台子机;1.1 进行克隆21.2 下一步1.3 下一步1.4 下一步1.5 根据子机需要,命名和安装路径1.6 ..._创建一个hadoop项目
心脏滴血漏洞HeartBleed CVE-2014-0160深入代码层面的分析_heartbleed代码分析-程序员宅基地
文章浏览阅读1.7k次。心脏滴血漏洞HeartBleed CVE-2014-0160 是由heartbeat功能引入的,本文从深入码层面的分析该漏洞产生的原因_heartbleed代码分析
java读取ofd文档内容_ofd电子文档内容分析工具(分析文档、签章和证书)-程序员宅基地
文章浏览阅读1.4k次。前言ofd是国家文档标准,其对标的文档格式是pdf。ofd文档是容器格式文件,ofd其实就是压缩包。将ofd文件后缀改为.zip,解压后可看到文件包含的内容。ofd文件分析工具下载:点我下载。ofd文件解压后,可以看到如下内容: 对于xml文件,可以用文本工具查看。但是对于印章文件(Seal.esl)、签名文件(SignedValue.dat)就无法查看其内容了。本人开发一款ofd内容查看器,..._signedvalue.dat
基于FPGA的数据采集系统(一)_基于fpga的信息采集-程序员宅基地
文章浏览阅读1.8w次,点赞29次,收藏313次。整体系统设计本设计主要是对ADC和DAC的使用,主要实现功能流程为:首先通过串口向FPGA发送控制信号,控制DAC芯片tlv5618进行DA装换,转换的数据存在ROM中,转换开始时读取ROM中数据进行读取转换。其次用按键控制adc128s052进行模数转换100次,模数转换数据存储到FIFO中,再从FIFO中读取数据通过串口输出显示在pc上。其整体系统框图如下:图1:FPGA数据采集系统框图从图中可以看出,该系统主要包括9个模块:串口接收模块、按键消抖模块、按键控制模块、ROM模块、D.._基于fpga的信息采集
微服务 spring cloud zuul com.netflix.zuul.exception.ZuulException GENERAL-程序员宅基地
文章浏览阅读2.5w次。1.背景错误信息:-- [http-nio-9904-exec-5] o.s.c.n.z.filters.post.SendErrorFilter : Error during filteringcom.netflix.zuul.exception.ZuulException: Forwarding error at org.springframework.cloud..._com.netflix.zuul.exception.zuulexception
邻接矩阵-建立图-程序员宅基地
文章浏览阅读358次。1.介绍图的相关概念 图是由顶点的有穷非空集和一个描述顶点之间关系-边(或者弧)的集合组成。通常,图中的数据元素被称为顶点,顶点间的关系用边表示,图通常用字母G表示,图的顶点通常用字母V表示,所以图可以定义为: G=(V,E)其中,V(G)是图中顶点的有穷非空集合,E(G)是V(G)中顶点的边的有穷集合1.1 无向图:图中任意两个顶点构成的边是没有方向的1.2 有向图:图中..._给定一个邻接矩阵未必能够造出一个图
随便推点
MDT2012部署系列之11 WDS安装与配置-程序员宅基地
文章浏览阅读321次。(十二)、WDS服务器安装通过前面的测试我们会发现,每次安装的时候需要加域光盘映像,这是一个比较麻烦的事情,试想一个上万个的公司,你天天带着一个光盘与光驱去给别人装系统,这将是一个多么痛苦的事情啊,有什么方法可以解决这个问题了?答案是肯定的,下面我们就来简单说一下。WDS服务器,它是Windows自带的一个免费的基于系统本身角色的一个功能,它主要提供一种简单、安全的通过网络快速、远程将Window..._doc server2012上通过wds+mdt无人值守部署win11系统.doc
python--xlrd/xlwt/xlutils_xlutils模块可以读xlsx吗-程序员宅基地
文章浏览阅读219次。python–xlrd/xlwt/xlutilsxlrd只能读取,不能改,支持 xlsx和xls 格式xlwt只能改,不能读xlwt只能保存为.xls格式xlutils能将xlrd.Book转为xlwt.Workbook,从而得以在现有xls的基础上修改数据,并创建一个新的xls,实现修改xlrd打开文件import xlrdexcel=xlrd.open_workbook('E:/test.xlsx') 返回值为xlrd.book.Book对象,不能修改获取sheett_xlutils模块可以读xlsx吗
关于新版本selenium定位元素报错:‘WebDriver‘ object has no attribute ‘find_element_by_id‘等问题_unresolved attribute reference 'find_element_by_id-程序员宅基地
文章浏览阅读8.2w次,点赞267次,收藏656次。运行Selenium出现'WebDriver' object has no attribute 'find_element_by_id'或AttributeError: 'WebDriver' object has no attribute 'find_element_by_xpath'等定位元素代码错误,是因为selenium更新到了新的版本,以前的一些语法经过改动。..............._unresolved attribute reference 'find_element_by_id' for class 'webdriver
DOM对象转换成jQuery对象转换与子页面获取父页面DOM对象-程序员宅基地
文章浏览阅读198次。一:模态窗口//父页面JSwindow.showModalDialog(ifrmehref, window, 'dialogWidth:550px;dialogHeight:150px;help:no;resizable:no;status:no');//子页面获取父页面DOM对象//window.showModalDialog的DOM对象var v=parentWin..._jquery获取父window下的dom对象
什么是算法?-程序员宅基地
文章浏览阅读1.7w次,点赞15次,收藏129次。算法(algorithm)是解决一系列问题的清晰指令,也就是,能对一定规范的输入,在有限的时间内获得所要求的输出。 简单来说,算法就是解决一个问题的具体方法和步骤。算法是程序的灵 魂。二、算法的特征1.可行性 算法中执行的任何计算步骤都可以分解为基本可执行的操作步,即每个计算步都可以在有限时间里完成(也称之为有效性) 算法的每一步都要有确切的意义,不能有二义性。例如“增加x的值”,并没有说增加多少,计算机就无法执行明确的运算。 _算法
【网络安全】网络安全的标准和规范_网络安全标准规范-程序员宅基地
文章浏览阅读1.5k次,点赞18次,收藏26次。网络安全的标准和规范是网络安全领域的重要组成部分。它们为网络安全提供了技术依据,规定了网络安全的技术要求和操作方式,帮助我们构建安全的网络环境。下面,我们将详细介绍一些主要的网络安全标准和规范,以及它们在实际操作中的应用。_网络安全标准规范