2021电赛F题-智能送药小车-国一_电赛送药小车国一多少分-程序员宅基地
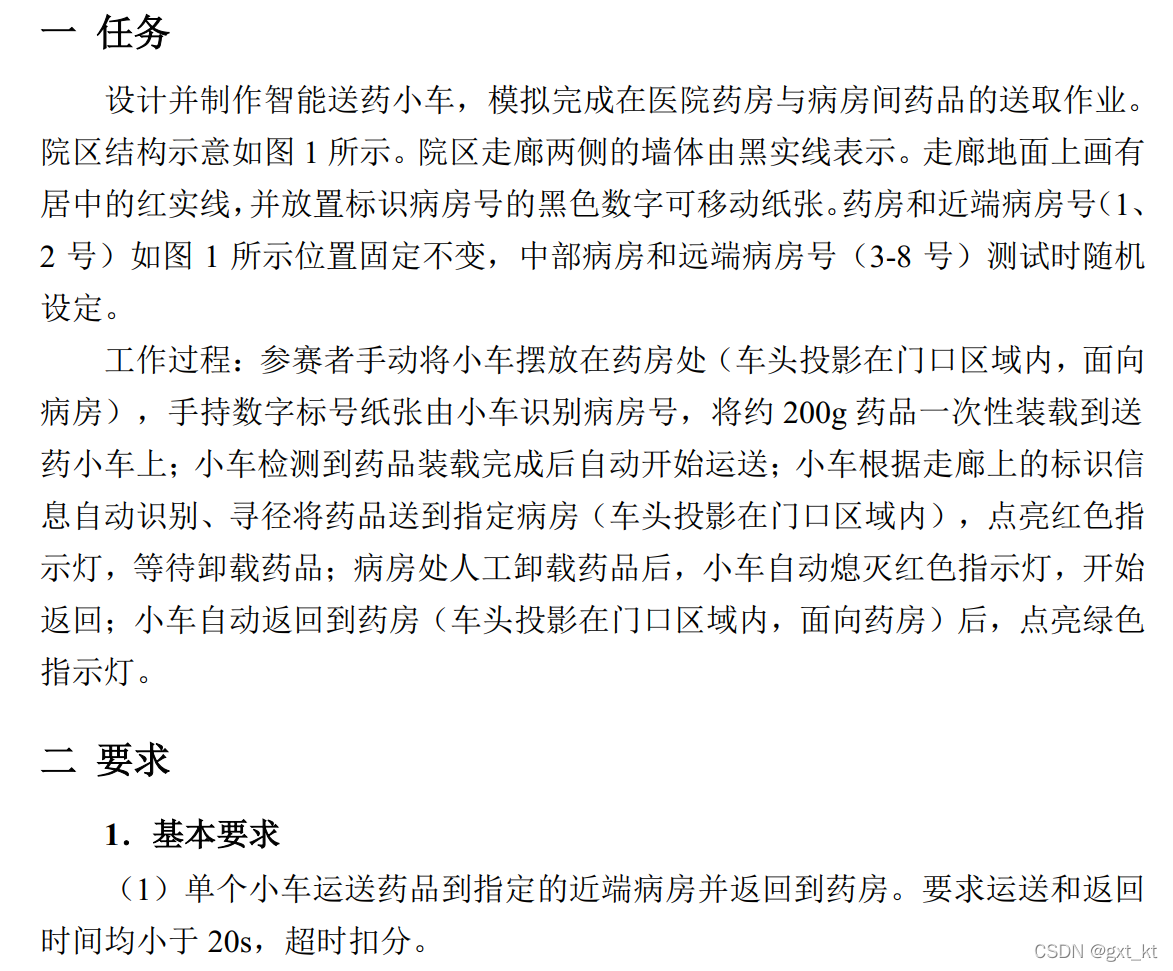
2021电赛F题-智能送药小车-国一
B站视频链接:https://www.bilibili.com/video/BV1u44y1e7qk/
(这大概是b站第一个双车视频吧,嘿嘿)
全部代码开源-下载链接:
https://download.csdn.net/download/my_id_kt/76744664
https://github.com/gxt-kt/2021-F-drug_car
两个内容都一样,(记得先看readme哈)
有任何问题欢迎评论或者私信
文章目录
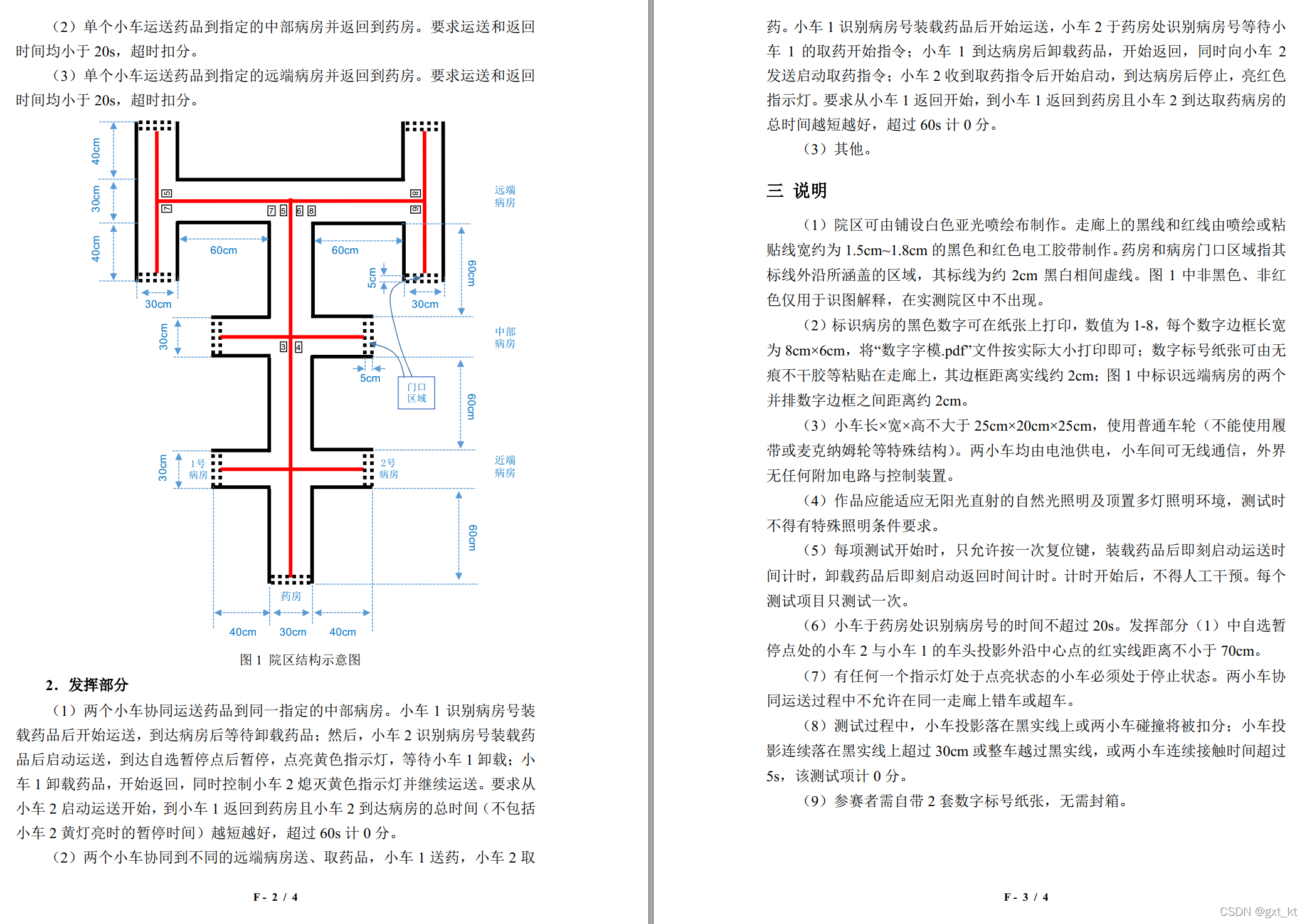
一、原题(了解可以跳过)
二、赛题分析
分析可知道这道题主要是以下几点:
1.巡线实现
2.数字识别实现
3.巡线找药房算法实现
1.巡线实现
最开始的想法是使用红外循迹模块,但由于之前使用过,再加上场地没到,等到数字识别有思路了再开始看巡线模块,发现坏了!普通的光电根本识别不了,当时立马就去淘宝上买那种改成光敏电阻的巡线模块,感觉快递有点来不及(广东到南京),巡线是赛题的基础,根本等不了两天的快递,立马把方案换成openmv寻找中线,由我的一名队友全部负责,差不多第二天晚上就可以了。
具体思路是把一副完整图像分块,分好了分别找红色色块,结合图像中间和边缘红块,可以很容易得到线的中心和十字路口信息。效果很稳定。
2.数字识别实现
最开始数字识别是打算用openmv模板匹配的,第一天上午发现不行,倒不是不行,就是成功率,帧率感人,我们队从始至终都是想不停车识别的,就那个帧率成功率想不停车都难,果断换成k210,第一天拍了几百张,训练出来效果也不行,当时心态就有点崩,感觉死在了第一步,第二天我的主搞k210队友提出也许是昨天拍的训练集离数字太远了,这次换成20~25cm左右的照片训练集,虽然当时就拍了几百张,效果就立竿见影了,k210的成功率也很高,基本上80%以上,对于一些不容易误识别的基本都是90%+,也就是那时候感觉差不多了开始搞巡线了。
3.巡线找药房实现
这个主要是openmv和k210的效果好,调第一辆车的时候没遇见什么难的,大致流程就是
// 开始识别数字+寻线—>//
识别到第个十字路口// 识别到停车边界—>停车亮灯—>
根据已经存储到的k210数字判断走向—>
重复流程
大致流程是上面那样,关键点就是识别十字路口,并且在走过一次十字路口后清空上次存储的数字,开始重新识别
三、other细节
当时发送赛道某个别拐角会让k210误识别成7,但发现这时候的7识别率都只有5,6成,所以当时就在k210代码里加入识别率的阈值,只有高于一定值的数字才会被认作有效
1.k210,openmv都是通过串口通信
串口通信用的接收中断加空闲中断,为啥不用dma,因为这次我们车上包括调试,双车通信,串口占用率很高,根据经验用dma多串口有概率丢帧,所以基本都是用的接收中断,空闲中断也就几个用了。
2.我们用了两个k210,识别不停车
1.k210本身帧率不算低,当时本来想关闭屏幕显示再提高帧率的,发现并不明显,估计屏幕发送显示本身也用了dma,后来也就一直开着也方便调试
2.k210的识别是弄一个8个的数组,每帧识别到哪个数字对应的数组值会加1,所以我们只需要排序这个数组就知道识别到的数字是谁了
3.k210会在走廊尽头同时识别两个数字,所以用到了一个算法,找一堆乱序数字中最大的两个数,使用这个算法后也就解决了两个数字识别问题
4.其实以上关于k210或者openmv都用了很多阈值判断或者滤波判断来减少误差或者误判,但没必要说的很详细,就把一些关键一点的说了比如前文k210解决误识别数字7的问题。
3.巡回算法
3.1小车怎么知道回来的路怎么走呢: 我们定义一个数组,每次碰到十字路口就记录下当前走向,比如说左转弯计1,直走计2,右转弯计3,如果右碰到十字路口就记录第二次走向,以此类推,当走到药房时我们就已经知道之前是怎么走过来的了。
3.2形象点描述:你去找人问题,他会说往前走多少米右拐,再一直走,碰到小巷左拐,走到底就到了
这道题就忽略掉距离信息,只看拐弯点和拐弯点的走向。
3.3接着上文: 我们的小车在回来的时候只需要倒着看拐弯点就可以了,走到十字路口,看你上次怎么走的,上次直走这次也直走,上次左拐这次就右拐,遍历完你之前写的数组就能回到原位了。
4.电机控制
由于时间紧迫,并且当时不认为本题难点在这里,就只实现了单环速度PID控制,建议大家有时间写个电机速度位置双环算法。这也是我认为我们在这道题前期准备中缺失的一个小点。
5.双车控制
其实我们第二辆车很破旧,电机十分垃圾,重要的是我在4.电机控制那里的PID参数用不了,由于是另外两个临时凑的电机,pid参数都得变,这也是我们最难受的一点,我们大概在第三天中午就已经完全完成了第一辆车的功能,第二辆车由于车模和芯片问题,一直出问题,说实话我们三个人被第二辆车搞的心力交瘁,当时都想不搞扩展了,后来发现是主控芯片坏了,我就用热风枪吹了下来,换了一块开发板上的芯片上去。(一直没查出来的原因是这块芯片能正常下程序,rcc正常,led闪烁正常,就是串口和某些io引脚彻底损坏,就一直没怀疑到芯片头上去)到这已经是最后一天下午了,我们赶着2号车勉强能用的条件下花了5个小时把扩展功能写了,至此比赛封箱,完结。
至此其实无论思路还是实现方案已经分析完了,后面就是贴代码贴图环节
openmv代码
# Hello World Example
#
# Welcome to the OpenMV IDE! Click on the green run arrow button below to run the script!
import pyb, sensor, image, math, time
from pyb import UART
import json
uart = UART(3,115200)
red_threshold = [(71, 25, 98, 19, 101, -14)]
black_threshold = [(0, 42, -84, 19, -104, 32)]
#QVGA 320*240
roi_1 = [(40, 0, 240, 40), # 北
(40, 200, 160, 40), # 南
(0, 0, 40, 240), # 西
(280, 0, 40, 240), # 东
(30,80,300,80)] # 中
sensor.reset() # 初始化摄像头
sensor.set_pixformat(sensor.RGB565) # 格式为 RGB565.
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(20) # 跳过10帧,使新设置生效
sensor.set_auto_whitebal(False) # turn this off.
sensor.set_auto_gain(False) # must be turned off for color tracking
clock = time.clock()
buf =[0 for i in range(5)]
m = -1
zhong_x = 0
zhong_y = 0
bei_x = 0
bei_y = 0
nan_x = 0
nan_y = 0
dong_x = 0
dong_y = 0
xi_x = 0
xi_y = 0
black_num = 0
threshold_pixel = 280
uart.init(115200, bits=8, parity=None, stop=1)
def pack_dot_data():
pack_data=bytearray([0xAA,0xFF,zhong_x>>8,zhong_x,dong_y>>8,dong_y,xi_y>>8,xi_y,
black_num,0x00,0x00])
lens = len(pack_data) #数据包大小
#pack_data[3] = lens-6; #有效数据个数
sc = 0
ac = 0
i = 0
while i<(lens-1):
sc = sc + pack_data[i]
ac = ac + sc
i=i+1
pack_data[lens-2] = sc
pack_data[lens-1] = ac;
return pack_data
while(True):
clock.tick()
m = -1
isten = 0
black_num = 0
img = sensor.snapshot().lens_corr(strength = 1.8, zoom = 1.0)
for r in roi_1:
m += 1
blobs = img.find_blobs(red_threshold, roi=r[0:4],pixels_threshold=100, area_threshold=100, merge=True)
#img.draw_rectangle(r[0:4], color=(255,0,0))
if blobs:
most_pixels = 0
largest_blob = 0
for i in range(len(blobs)):
#目标区域找到的颜色块(线段块)可能不止一个,找到最大的一个,作为本区域内的目标直线
if blobs[i].pixels() > most_pixels:
most_pixels = blobs[i].pixels()
#merged_blobs[i][4]是这个颜色块的像素总数,如果此颜色块像素总数大于
largest_blob = i
#print(blobs[largest_blob].cx(),blobs[largest_blob].cy())
if m == 0:
bei_x = blobs[largest_blob].cx()
bei_y = blobs[largest_blob].cy()
elif m == 1:
nan_x = blobs[largest_blob].cx()
nan_y = blobs[largest_blob].cy()
elif m == 2:
dong_x = blobs[largest_blob].cx()
dong_y = blobs[largest_blob].cy()
elif m == 3:
xi_x = blobs[largest_blob].cx()
xi_y = blobs[largest_blob].cy()
elif m == 4:
zhong_x = blobs[largest_blob].cx()
zhong_y = blobs[largest_blob].cy()
# Draw a rect around the blob.
img.draw_rectangle(blobs[largest_blob].rect())
#将此区域的像素数最大的颜色块画矩形和十字形标记出来
img.draw_cross(blobs[largest_blob].cx(),
blobs[largest_blob].cy())
buf[m] = 1
else:
buf[m] = 0
if m == 0:
bei_x = 0
bei_y = 0
elif m == 1:
nan_x = 0
nan_y = 0
elif m == 2:
dong_x = 0
dong_y = 0
elif m == 3:
xi_x = 0
xi_y = 0
elif m == 4:
zhong_x = 0
zhong_y = 0
blobs = img.find_blobs(black_threshold, roi=r[0:4],pixels_threshold=100, area_threshold=100, merge=False)
for b in blobs:
#记录大于threshold_pixel值的黑色色块的数量
if b.pixels() > threshold_pixel:
img.draw_rectangle(b.rect())
print(b.pixels())
black_num = black_num + 1;
print(zhong_x,zhong_y)
uart.write(pack_dot_data())
print(black_num)
print(clock.fps())
k210关键代码,全部代码比较多,请下载看(开源)
import sensor, image, lcd, time
import KPU as kpu
import gc, sys
from fpioa_manager import fm
from machine import UART
fm.register(15, fm.fpioa.UART1_TX, force=True)
fm.register(17, fm.fpioa.UART1_RX, force=True)
uart_A = UART(UART.UART1, 115200)
class Dot(object):
x = 0
y = 0
ok = 0
flag = 0
One = 0
Two = 0
Three = 0
Four = 0
Five = 0
Six = 0
Seven = 0
Eight = 0
dot = Dot()
#数据打包#
def pack_dot_data():
pack_data=bytearray([0xAA,0xFF,
dot.One,dot.Two,dot.Three,dot.Four,dot.Five,dot.Six,dot.Seven,dot.Eight,
0xCC])
dot.x = 0
dot.y = 0
dot.One = 0
dot.Two = 0
dot.Three = 0
dot.Four = 0
dot.Five = 0
dot.Six = 0
dot.Seven = 0
dot.Eight = 0
lens = len(pack_data) #数据包大小
#pack_data[3] = lens-6; #有效数据个数
#sc = 0
#ac = 0
#i = 0
#while i<(lens-1):
#sc = sc + pack_data[i]
#ac = ac + sc
#i=i+1
#pack_data[lens-2] = sc
#pack_data[lens-1] = ac;
return pack_data
# #
def lcd_show_except(e):
import uio
err_str = uio.StringIO()
sys.print_exception(e, err_str)
err_str = err_str.getvalue()
img = image.Image(size=(224,224))
img.draw_string(0, 10, err_str, scale=1, color=(0xff,0x00,0x00))
lcd.display(img)
def main(anchors, labels = None, model_addr="/sd/test.kmodel", sensor_window=(224, 224), lcd_rotation=0, sensor_hmirror=False, sensor_vflip=False):
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.set_windowing(sensor_window)
sensor.set_hmirror(1)
sensor.set_vflip(1)
sensor.run(1)
lcd.init(type=1)
lcd.rotation(lcd_rotation)
lcd.clear(lcd.WHITE)
if not labels:
with open('labels.txt','r') as f:
exec(f.read())
if not labels:
print("no labels.txt")
img = image.Image(size=(320, 240))
img.draw_string(90, 110, "no label s.txt", color=(255, 0, 0), scale=2)
lcd.display(img)
return 1
try:
img = image.Image("startup.jpg")
lcd.display(img)
except Exception:
img = image.Image(size=(320, 240))
img.draw_string(90, 110, "loading model...", color=(255, 255, 255), scale=2)
lcd.display(img)
task = kpu.load(model_addr)
kpu.init_yolo2(task, 0.5, 0.3, 5, anchors) # threshold:[0,1], nms_value: [0, 1]
try:
while(True):
img = sensor.snapshot()
t = time.ticks_ms()
objects = kpu.run_yolo2(task, img)
t = time.ticks_ms() - t
if objects:
for obj in objects:
pos = obj.rect()
img.draw_rectangle(pos)
dot.x = pos[0]+(int)(pos[2]/2) #x坐标
dot.y = pos[1]+(int)(pos[3]/2) #y坐标
dot.ok= dot.ok+1
img.draw_cross(dot.x, dot.y)
img.draw_string(pos[0], pos[1], "%s : %.2f" %(labels[obj.classid()], obj.value()), scale=2)
if (labels[obj.classid()] == "1" and obj.value() > 0.70) or dot.One==1:
dot.One = 1
else :
dot.One = 0
if (labels[obj.classid()] == "2" and obj.value() > 0.70) or dot.Two==1:
dot.Two = 1
else :
dot.Two = 0
if (labels[obj.classid()] == "3" and obj.value() > 0.70) or dot.Three==1:
dot.Three = 1
else :
dot.Three = 0
if (labels[obj.classid()] == "4" and obj.value() > 0.70) or dot.Four==1:
dot.Four = 1
else :
dot.Four = 0
if (labels[obj.classid()] == "5" and obj.value() > 0.50) or dot.Five==1:
dot.Five = 1
else :
dot.Five = 0
if (labels[obj.classid()] == "6" and obj.value() > 0.70) or dot.Six==1:
dot.Six = 1
else :
dot.Six = 0
if (labels[obj.classid()] == "7" and obj.value() > 0.70) or dot.Seven==1:
dot.Seven = 1
else :
dot.Seven = 0
if (labels[obj.classid()] == "8" and obj.value() > 0.70) or dot.Eight==1:
dot.Eight = 1
else :
dot.Eight = 0
# print("centre_x = %d, centre_y = %d"%(dot.x, dot.y))
else :
dot.ok = 0
dot.flag = dot.ok
dot.One = 0
dot.Two = 0
dot.Three = 0
dot.Four = 0
dot.Five = 0
dot.Six = 0
dot.Seven = 0
dot.Eight = 0
if dot.ok>10:
dot.flag = 1
uart_A.write(pack_dot_data()) #发送数据
img.draw_string(0, 200, "t:%dms" %(t), scale=2)
lcd.display(img)
except Exception as e:
raise e
finally:
kpu.deinit(task)
if __name__ == "__main__":
try:
labels = ["3", "4", "1", "2", "7", "8", "5", "6"]
anchors = [1.7048, 1.6693, 1.8474, 2.1746, 2.0003, 1.8557, 2.1034, 2.612, 2.4321, 3.0607]
# main(anchors = anchors, labels=labels, model_addr=0x300000, lcd_rotation=0)
main(anchors = anchors, labels=labels, model_addr="/sd/test.kmodel")
except Exception as e:
sys.print_exception(e)
lcd_show_except(e)
finally:
gc.collect()
stm32f407代码不好放,直接下载
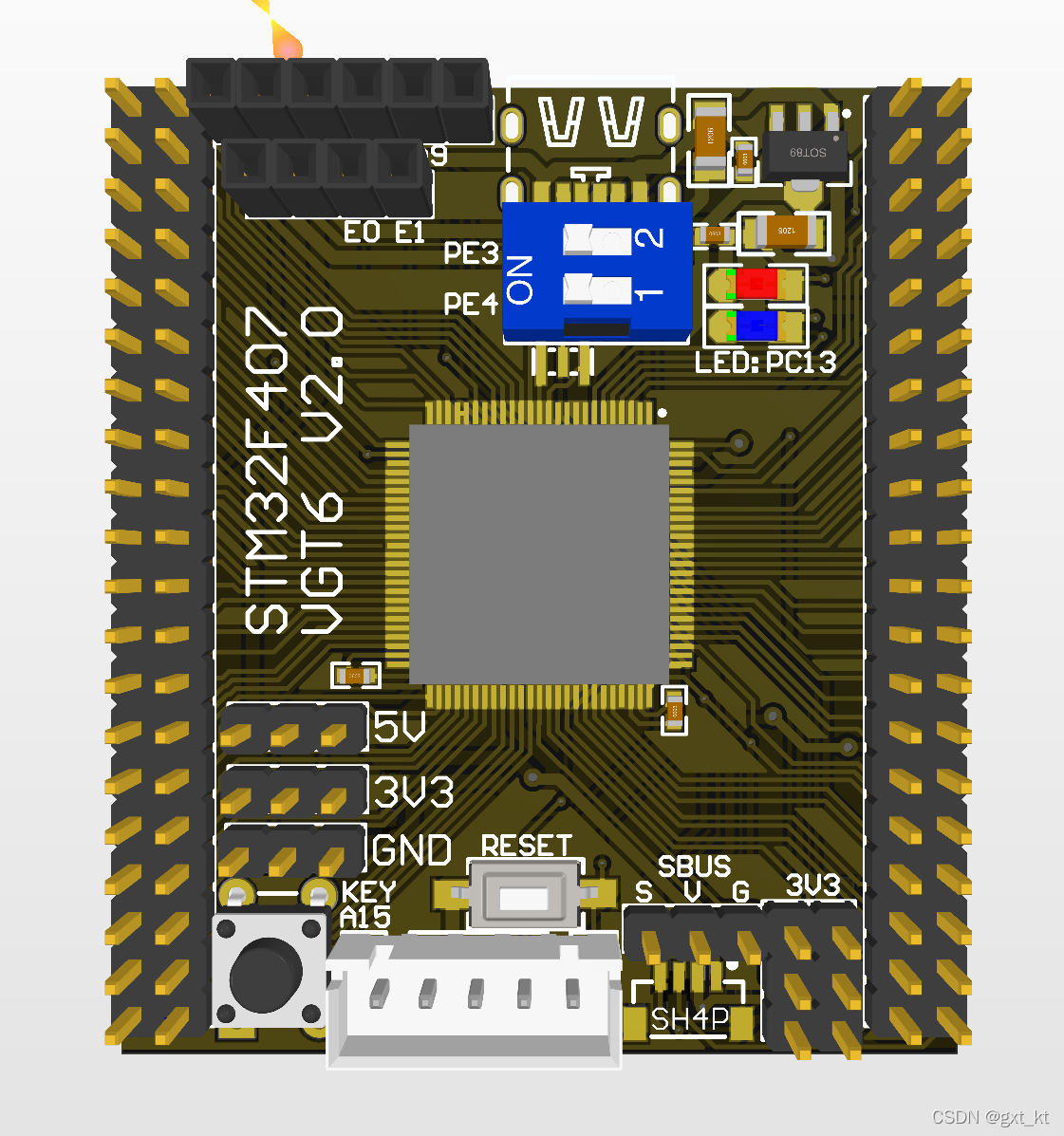
比赛两辆车车上的核心板AD3D图(自己画的)
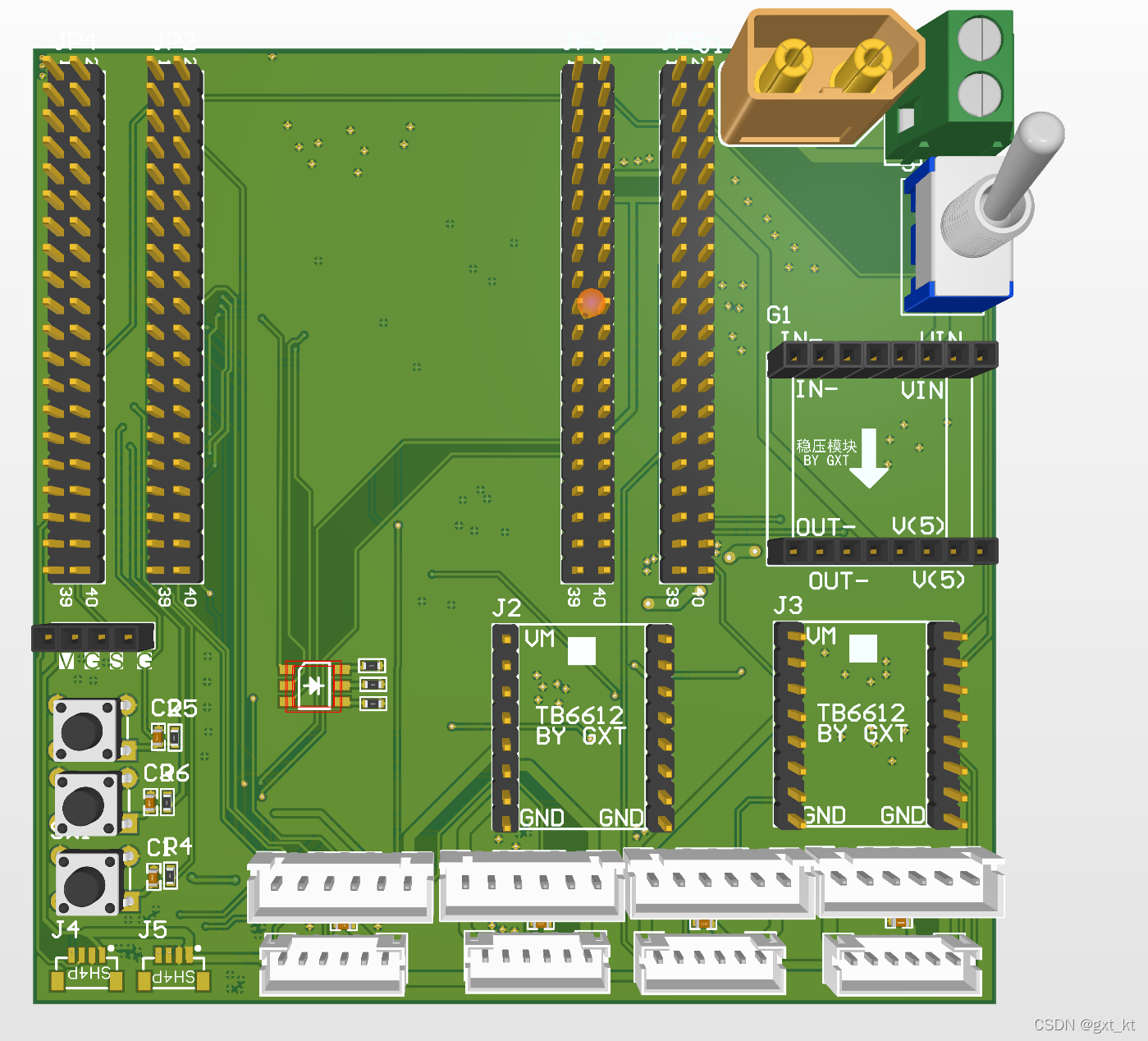
对应上面核心板的底板
智能推荐
c# 调用c++ lib静态库_c#调用lib-程序员宅基地
文章浏览阅读2w次,点赞7次,收藏51次。四个步骤1.创建C++ Win32项目动态库dll 2.在Win32项目动态库中添加 外部依赖项 lib头文件和lib库3.导出C接口4.c#调用c++动态库开始你的表演...①创建一个空白的解决方案,在解决方案中添加 Visual C++ , Win32 项目空白解决方案的创建:添加Visual C++ , Win32 项目这......_c#调用lib
deepin/ubuntu安装苹方字体-程序员宅基地
文章浏览阅读4.6k次。苹方字体是苹果系统上的黑体,挺好看的。注重颜值的网站都会使用,例如知乎:font-family: -apple-system, BlinkMacSystemFont, Helvetica Neue, PingFang SC, Microsoft YaHei, Source Han Sans SC, Noto Sans CJK SC, W..._ubuntu pingfang
html表单常见操作汇总_html表单的处理程序有那些-程序员宅基地
文章浏览阅读159次。表单表单概述表单标签表单域按钮控件demo表单标签表单标签基本语法结构<form action="处理数据程序的url地址“ method=”get|post“ name="表单名称”></form><!--action,当提交表单时,向何处发送表单中的数据,地址可以是相对地址也可以是绝对地址--><!--method将表单中的数据传送给服务器处理,get方式直接显示在url地址中,数据可以被缓存,且长度有限制;而post方式数据隐藏传输,_html表单的处理程序有那些
PHP设置谷歌验证器(Google Authenticator)实现操作二步验证_php otp 验证器-程序员宅基地
文章浏览阅读1.2k次。使用说明:开启Google的登陆二步验证(即Google Authenticator服务)后用户登陆时需要输入额外由手机客户端生成的一次性密码。实现Google Authenticator功能需要服务器端和客户端的支持。服务器端负责密钥的生成、验证一次性密码是否正确。客户端记录密钥后生成一次性密码。下载谷歌验证类库文件放到项目合适位置(我这边放在项目Vender下面)https://github.com/PHPGangsta/GoogleAuthenticatorPHP代码示例://引入谷_php otp 验证器
【Python】matplotlib.plot画图横坐标混乱及间隔处理_matplotlib更改横轴间距-程序员宅基地
文章浏览阅读4.3k次,点赞5次,收藏11次。matplotlib.plot画图横坐标混乱及间隔处理_matplotlib更改横轴间距
docker — 容器存储_docker 保存容器-程序员宅基地
文章浏览阅读2.2k次。①Storage driver 处理各镜像层及容器层的处理细节,实现了多层数据的堆叠,为用户 提供了多层数据合并后的统一视图②所有 Storage driver 都使用可堆叠图像层和写时复制(CoW)策略③docker info 命令可查看当系统上的 storage driver主要用于测试目的,不建议用于生成环境。_docker 保存容器
随便推点
网络拓扑结构_网络拓扑csdn-程序员宅基地
文章浏览阅读834次,点赞27次,收藏13次。网络拓扑结构是指计算机网络中各组件(如计算机、服务器、打印机、路由器、交换机等设备)及其连接线路在物理布局或逻辑构型上的排列形式。这种布局不仅描述了设备间的实际物理连接方式,也决定了数据在网络中流动的路径和方式。不同的网络拓扑结构影响着网络的性能、可靠性、可扩展性及管理维护的难易程度。_网络拓扑csdn
JS重写Date函数,兼容IOS系统_date.prototype 将所有 ios-程序员宅基地
文章浏览阅读1.8k次,点赞5次,收藏8次。IOS系统Date的坑要创建一个指定时间的new Date对象时,通常的做法是:new Date("2020-09-21 11:11:00")这行代码在 PC 端和安卓端都是正常的,而在 iOS 端则会提示 Invalid Date 无效日期。在IOS年月日中间的横岗许换成斜杠,也就是new Date("2020/09/21 11:11:00")通常为了兼容IOS的这个坑,需要做一些额外的特殊处理,笔者在开发的时候经常会忘了兼容IOS系统。所以就想试着重写Date函数,一劳永逸,避免每次ne_date.prototype 将所有 ios
如何将EXCEL表导入plsql数据库中-程序员宅基地
文章浏览阅读5.3k次。方法一:用PLSQL Developer工具。 1 在PLSQL Developer的sql window里输入select * from test for update; 2 按F8执行 3 打开锁, 再按一下加号. 鼠标点到第一列的列头,使全列成选中状态,然后粘贴,最后commit提交即可。(前提..._excel导入pl/sql
Git常用命令速查手册-程序员宅基地
文章浏览阅读83次。Git常用命令速查手册1、初始化仓库git init2、将文件添加到仓库git add 文件名 # 将工作区的某个文件添加到暂存区 git add -u # 添加所有被tracked文件中被修改或删除的文件信息到暂存区,不处理untracked的文件git add -A # 添加所有被tracked文件中被修改或删除的文件信息到暂存区,包括untracked的文件...
分享119个ASP.NET源码总有一个是你想要的_千博二手车源码v2023 build 1120-程序员宅基地
文章浏览阅读202次。分享119个ASP.NET源码总有一个是你想要的_千博二手车源码v2023 build 1120
【C++缺省函数】 空类默认产生的6个类成员函数_空类默认产生哪些类成员函数-程序员宅基地
文章浏览阅读1.8k次。版权声明:转载请注明出处 http://blog.csdn.net/irean_lau。目录(?)[+]1、缺省构造函数。2、缺省拷贝构造函数。3、 缺省析构函数。4、缺省赋值运算符。5、缺省取址运算符。6、 缺省取址运算符 const。[cpp] view plain copy_空类默认产生哪些类成员函数