我的车联网IOV之路_survey and systematization of 3d object detection -程序员宅基地
一点点更新哦~~ 我的IOV现在只局限在V2X里
不知道还有没有一起的同学 要不要建个群什么的~ 网上各种资料较少 希望有同行一起交流哦~~
QQ群64104075 / WeChat github -- whaosoft
一、
V2X 车联网
(Vehicle to everything)是汽车、电子、信息通信、交通运输和交通管理等行业深度融合的新型产业形态。
C-V2X
(Cellular vehicle to everything,蜂窝车联网)无线通信技术,目前包括 LTE-V2X 和 NR-V2X,作为关键使能型技术,将有助于构建 “人-车-路-云” 协同的车联网产业生态体系。
通信: UU PC5
车载终端(TBOX)、车载娱乐系统(IVI)
VBOX 、RSU 、OBU
二、四跨相关
2018年三跨:
跨通信模组、跨终端、跨整车
2019年四跨:
跨芯片模组、跨终端、跨整车、跨安全平台
2020新四跨:
跨芯片模组、跨终端、跨整车、跨安全平台+高精地图和定位
去了2020和2021年,2023沈阳的四跨,所以在这里先说明一下哦~
三、busybox
四、autosar
五、自动驾驶相关
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、点云3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等
点云分割 SemanticKITTI
六、自动驾驶涉及的视觉相关
多模态融合
针对Lidar、Radar、视觉等数据方案进行融合感知;
-
A Survey on Deep Domain Adaptation for LiDAR Perception
-
Automatic Target Recognition on Synthetic Aperture Radar Imagery:A Survey
-
Deep Multi-modal Object Detection and Semantic Segmentation for Autonomous Driving:Datasets, Methods, and Challenges
-
MmWave Radar and Vision Fusion for Object Detection in Autonomous Driving:A Review
-
Multi-Modal 3D Object Detection in Autonomous Driving:A Survey
-
Multi-modal Sensor Fusion for Auto Driving Perception:A Survey
-
Multi-Sensor 3D Object Box Refinement for Autonomous Driving
-
Multi-View Fusion of Sensor Data for Improved Perception and Prediction in Autonomous Driving
3D检测
对基于单目图像、双目图像、点云数据、多模态数据的3D检测方法进行了梳理;
-
3D Object Detection for Autonomous Driving:A Review and New Outlooks
-
3D Object Detection from Images for Autonomous Driving A Survey
-
A Survey of Robust LiDAR-based 3D Object Detection Methods for autonomous driving
-
A Survey on 3D Object Detection Methods for Autonomous Driving Applications
-
Deep Learning for 3D Point Cloud Understanding:A Survey
-
Multi-Modal 3D Object Detection in Autonomous Driving:a survey
-
Survey and Systematization of 3D Object Detection Models and Methods
目标检测综述
主要涉及通用目标检测任务、检测任务中的数据不均衡问题、伪装目标检测、自动驾驶领域检测任务、anchor-based、anchor-free、one-stage、two-stage方案等;
-
A Survey of Deep Learning for Low-Shot Object Detection
-
A Survey of Deep Learning-based Object Detection
-
Camouflaged Object Detection and Tracking:A Survey
-
Deep Learning for Generic Object Detection:A Survey
-
Imbalance Problems in Object Detection:A survey
-
Object Detection in 20 Years:A Survey
-
Object Detection in Autonomous Vehicles:Status and Open Challenges
-
Recent Advances in Deep Learning for Object Detection
目标检测数据增强与不均衡问题
主要涉及目标检测任务中的数据增强、小目标检测、小样本学习、autoargument等工作;
-
A survey on Image Data Augmentation for Deep Learning
-
Augmentation for small object detection
-
Bag of Freebies for Training Object Detection Neural Networks
-
Generalizing from a Few Examples:A Survey on Few-Shot
-
Learning Data Augmentation Strategies for Object Detection
分割综述
主要对实时图像分割、视频分割、实例分割、弱监督/无监督分割、点云分割等方案展开讨论;
-
A Review of Point Cloud Semantic Segmentation
-
A SURVEY ON DEEP LEARNING METHODS FOR SEMANTIC IMAGE SEGMENTATION IN REAL-TIME
-
A SURVEY ON DEEP LEARNING METHODS FOR SEMANTIC
-
A Survey on Deep Learning Technique for Video Segmentation
-
A Survey on Instance Segmentation State of the art
-
A Survey on Label-efficient Deep Segmentation-Bridging the Gap between Weak Supervision and Dense Prediction
-
A Technical Survey and Evaluation of Traditional Point Cloud Clustering for LiDAR Panoptic Segmentation
-
Evolution of Image Segmentation using Deep Convolutional Neural Network A Survey
-
On Efficient Real-Time Semantic Segmentation
-
Unsupervised Domain Adaptation for Semantic Image Segmentation-a Comprehensive Survey
多任务学习
对检测+分割+关键点+车道线联合任务训练方法进行了汇总;
-
Cascade R-CNN
-
Deep Multi-Task Learning for Joint Localization, Perception, and Prediction
-
Mask R-CNN
-
Mask Scoring R-CNN
-
Multi-Task Multi-Sensor Fusion for 3D Object Detection
-
MultiTask-CenterNet
-
OmniDet
-
YOLOP
-
YOLO-Pose
目标跟踪
对单目标和多目标跟踪、滤波和端到端方法进行了汇总;
-
Camouflaged Object Detection and Tracking:A Survey
-
Deep Learning for UAV-based Object Detection and Tracking:A Survey
-
Deep Learning on Monocular Object Pose Detection and Tracking:A Comprehensive Overview
-
Detection, Recognition, and Tracking:A Survey
-
Infrastructure-Based Object Detection and Tracking for Cooperative Driving Automation:A Survey
-
Recent Advances in Embedding Methods for Multi-Object Tracking:A Survey
-
Single Object Tracking:A Survey of Methods, Datasets, and Evaluation Metrics
-
Visual Object Tracking with Discriminative Filters and Siamese Networks:A Survey and Outlook
深度估计
针对单目、双目深度估计方法进行了汇总,对户外常见问题与精度损失展开了讨论;
-
A Survey on Deep Learning Techniques for Stereo-based Depth Estimation
-
Deep Learning based Monocular Depth Prediction:Datasets, Methods and Applications
-
Monocular Depth Estimation Based On Deep Learning:An Overview
-
Monocular Depth Estimation:A Survey
-
Outdoor Monocular Depth Estimation:A Research Review
-
Towards Real-Time Monocular Depth Estimation for Robotics:A Survey
关键点检测
人体关键点检测方法汇总,对车辆关键点检测具有一定参考价值;
-
2D Human Pose Estimation:A Survey
-
A survey of top-down approaches for human pose estimation
-
Efficient Annotation and Learning for 3D Hand Pose Estimation:A Survey
-
Recent Advances in Monocular 2D and 3D Human Pose Estimation:A Deep Learning Perspective
Transformer综述
视觉transformer、轻量级transformer方法汇总;
-
A Survey of Visual Transformers
-
A Survey on Visual Transformer
-
Efficient Transformers:A Survey
车道线检测
对2D/3D车道线检测方法进行了汇总,基于分类、检测、分割、曲线拟合等;
2D车道线
-
A Keypoint-based Global Association Network for Lane Detection
-
CLRNet:Cross Layer Refinement Network for Lane Detection
-
End-to-End Deep Learning of Lane Detection and Path Prediction for Real-Time Autonomous Driving
-
End-to-end Lane Detection through Differentiable Least-Squares Fitting
-
Keep your Eyes on the Lane:Real-time Attention-guided Lane Detection
-
LaneNet:Real-Time Lane Detection Networks for Autonomous Driving
-
Towards End-to-End Lane Detection:an Instance Segmentation Approach
-
Ultra Fast Structure-aware Deep Lane Detection
3D车道线
-
3D-LaneNet+:Anchor Free Lane Detection using a Semi-Local Representation
-
Deep Multi-Sensor Lane Detection
-
FusionLane:Multi-Sensor Fusion for Lane Marking Semantic Segmentation Using Deep Neural Networks
-
Gen-LaneNet:A Generalized and Scalable Approach for 3D Lane Detection
-
ONCE-3DLanes:Building Monocular 3D Lane Detection
-
3D-LaneNet:End-to-End 3D Multiple Lane Detection
SLAM综述
定位与建图方案汇总;
-
A Survey on Active Simultaneous Localization and Mapping-State of the Art and New Frontiers
-
The Revisiting Problem in Simultaneous Localization and Mapping-A Survey on Visual Loop Closure Detection
-
From SLAM to Situational Awareness-Challenges
-
Simultaneous Localization and Mapping Related Datasets-A Comprehensive Survey
模型量化
-
A Survey on Deep Neural Network CompressionChallenges, Overview, and Solutions
七、行泊一体
汽车智能化已然成为行业发展趋势,智能驾驶正在加速融入我们的生活,ADAS功能逐渐成为各类新款车型的标配,近年来,“行泊一体”概念也成为行业内热门话题,越来越多的厂商开始着重发力于研发“行泊一体”方案。我们看到,现阶段智能汽车行业正在大规模力推无限接近于L3的L2++或L2.9自动驾驶量产落地。在这一过程中,各种新技术层出不穷,而融合众多新技术的“行泊一体”方案受到车企们的推崇。
从本质上来说,行泊一体是行车场景与泊车场景的打通,需要实现包括拥堵跟车、自动变道、高速巡航、上下匝道、自动泊车等一系列技术打通,实现关键技术主要包括感知与定位、决策与规划、控制与执行等,行泊一体方案是ADAS向高阶自动驾驶进阶的必经之路。
#自动驾驶常用功能场景
在日常的城市用车过程中常常遇到各种各样的行车泊车场景,根据不同路段的行车泊车场景,组成了智能汽车常见的智能驾驶功能包括:
行车场景:
ACC,自适应巡航控制;ALC,自动变道辅助;TJA,交通拥堵辅助;LCC车道居中;NOA,领航辅助;
泊车场景:
APA,自动泊车辅助功能;RPA,遥控泊车辅助;SS,智能召唤功能;HPA,记忆泊车功能;AVP,自主代客泊车。

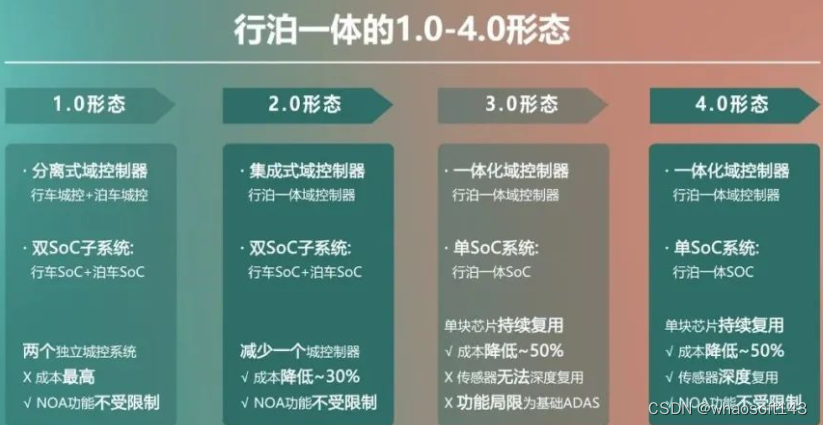
#发展形态及趋势
我们可以看到,要实现上述自动驾驶行车、泊车的功能,现阶段市场上大部分车型采用传统的分布式ADAS ECU(比如,智能摄像头一体机、泊车控制器、全景环视控制器)行泊分离式域控制器,即行车域控和泊车域控相分离,行车与泊车调用各自芯片和传感器。然而随着整车电子电气架构由分布式向域集中式演进,以及传感器和域控制器共用技术的成熟,正进一步加快“行泊一体”方案的量产落地。
相较行泊分离方案,行泊一体方案具备如下优势:
-
传感器共用,性能得到提升
-
提升软件开发效率,底层软件、中间件更通用,还可单独定制不同算法模块功能;
-
方便功能迭代,行泊一体域控制器通过部署分层式的软件架构,实现软硬件解耦,配备有百兆甚至千兆以太网接口,并且有更多的算力支持高级算法模型的部署,因此能够更好地支持功能的OTA升级。
-
降本增效,复用了控制器算力,节省控制器的硬件成本,简化域控制器的硬件接口,减少布线长度,进而有效降低整车的复杂度,降低整个控制器的生产成本。
智能推荐
while循环&CPU占用率高问题深入分析与解决方案_main函数使用while(1)循环cpu占用99-程序员宅基地
文章浏览阅读3.8k次,点赞9次,收藏28次。直接上一个工作中碰到的问题,另外一个系统开启多线程调用我这边的接口,然后我这边会开启多线程批量查询第三方接口并且返回给调用方。使用的是两三年前别人遗留下来的方法,放到线上后发现确实是可以正常取到结果,但是一旦调用,CPU占用就直接100%(部署环境是win server服务器)。因此查看了下相关的老代码并使用JProfiler查看发现是在某个while循环的时候有问题。具体项目代码就不贴了,类似于下面这段代码。while(flag) {//your code;}这里的flag._main函数使用while(1)循环cpu占用99
【无标题】jetbrains idea shift f6不生效_idea shift +f6快捷键不生效-程序员宅基地
文章浏览阅读347次。idea shift f6 快捷键无效_idea shift +f6快捷键不生效
node.js学习笔记之Node中的核心模块_node模块中有很多核心模块,以下不属于核心模块,使用时需下载的是-程序员宅基地
文章浏览阅读135次。Ecmacript 中没有DOM 和 BOM核心模块Node为JavaScript提供了很多服务器级别,这些API绝大多数都被包装到了一个具名和核心模块中了,例如文件操作的 fs 核心模块 ,http服务构建的http 模块 path 路径操作模块 os 操作系统信息模块// 用来获取机器信息的var os = require('os')// 用来操作路径的var path = require('path')// 获取当前机器的 CPU 信息console.log(os.cpus._node模块中有很多核心模块,以下不属于核心模块,使用时需下载的是
数学建模【SPSS 下载-安装、方差分析与回归分析的SPSS实现(软件概述、方差分析、回归分析)】_化工数学模型数据回归软件-程序员宅基地
文章浏览阅读10w+次,点赞435次,收藏3.4k次。SPSS 22 下载安装过程7.6 方差分析与回归分析的SPSS实现7.6.1 SPSS软件概述1 SPSS版本与安装2 SPSS界面3 SPSS特点4 SPSS数据7.6.2 SPSS与方差分析1 单因素方差分析2 双因素方差分析7.6.3 SPSS与回归分析SPSS回归分析过程牙膏价格问题的回归分析_化工数学模型数据回归软件
利用hutool实现邮件发送功能_hutool发送邮件-程序员宅基地
文章浏览阅读7.5k次。如何利用hutool工具包实现邮件发送功能呢?1、首先引入hutool依赖<dependency> <groupId>cn.hutool</groupId> <artifactId>hutool-all</artifactId> <version>5.7.19</version></dependency>2、编写邮件发送工具类package com.pc.c..._hutool发送邮件
docker安装elasticsearch,elasticsearch-head,kibana,ik分词器_docker安装kibana连接elasticsearch并且elasticsearch有密码-程序员宅基地
文章浏览阅读867次,点赞2次,收藏2次。docker安装elasticsearch,elasticsearch-head,kibana,ik分词器安装方式基本有两种,一种是pull的方式,一种是Dockerfile的方式,由于pull的方式pull下来后还需配置许多东西且不便于复用,个人比较喜欢使用Dockerfile的方式所有docker支持的镜像基本都在https://hub.docker.com/docker的官网上能找到合..._docker安装kibana连接elasticsearch并且elasticsearch有密码
随便推点
Python 攻克移动开发失败!_beeware-程序员宅基地
文章浏览阅读1.3w次,点赞57次,收藏92次。整理 | 郑丽媛出品 | CSDN(ID:CSDNnews)近年来,随着机器学习的兴起,有一门编程语言逐渐变得火热——Python。得益于其针对机器学习提供了大量开源框架和第三方模块,内置..._beeware
Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
文章浏览阅读7.9k次。//// ViewController.swift// Day_10_Timer//// Created by dongqiangfei on 2018/10/15.// Copyright 2018年 飞飞. All rights reserved.//import UIKitclass ViewController: UIViewController { ..._swift timer 暂停
元素三大等待-程序员宅基地
文章浏览阅读986次,点赞2次,收藏2次。1.硬性等待让当前线程暂停执行,应用场景:代码执行速度太快了,但是UI元素没有立马加载出来,造成两者不同步,这时候就可以让代码等待一下,再去执行找元素的动作线程休眠,强制等待 Thread.sleep(long mills)package com.example.demo;import org.junit.jupiter.api.Test;import org.openqa.selenium.By;import org.openqa.selenium.firefox.Firefox.._元素三大等待
Java软件工程师职位分析_java岗位分析-程序员宅基地
文章浏览阅读3k次,点赞4次,收藏14次。Java软件工程师职位分析_java岗位分析
Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
文章浏览阅读2k次。Java:Unreachable code的解决方法_java unreachable code
标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地
文章浏览阅读1w次。1、html中设置标签data-*的值 标题 11111 222222、点击获取当前标签的data-url的值$('dd').on('click', function() { var urlVal = $(this).data('ur_如何根据data-*属性获取对应的标签对象