stm32 IIC驱动BH1750光照强度传感器/GY302模块_光照传感器gy302电压-程序员宅基地
STM32f1系列单片机使用IIC驱动BH1750
转发此文请标明出处!
-
首先说明下**GY302模块上面其实就是一个BH1750芯片**,然后加了一小丢丢的外部驱动电路,实际上本质来说没什么区别,用起来一样。
-
简单的来说下BH1750这款光照强度传感器吧,输入电压VCC在3.0v-3.6v之间,我们一般都是使用3.3v供电啦,通讯采用标准的IIC协议,自身的IIC地址可以有两种选择,怎么选择请看后面。它具有接近视觉的光谱效应,说白了就是你眼睛能感受到的光波范围,它也刚好是这个范围,所以这个模块用在什么光强感应的那些面向消费者的产品上最好了;它的输入光的范围是1-65535lx
-
刚开始的时候使用STM32的硬件IIC写过这个的程序,但是发现不管怎么整都是返回的0x80,而且STM32的硬件IIC确实是有点问题,后来硬是没弄出来就改用软件IIC了,下面的程序也是用的软件IIC写的,有用硬件IIC成功的朋友可以分享下哈,我把我写的硬件IIC的代码也丢在下面了,希望有热心的伙伴一起研究硬件IIC为什么不成功哈,写硬件IIC的时候一定要注意两点,其一,IIC从机的地址是7位地址往前移动一位,第八位是读写位,其二,STM32读和写的时序中的EV6事件虽然名字相同都叫EV6但是代码却不同,分别是
I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED和I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED一定要注意! -
下面讲下写BH1750的驱动程序的时候需要注意问题:
-
芯片IIC地址的选择:通过改变ADDR引脚的电平
- 接低电平的时候是“0100011”
- 接高电平的时候是“1011100”
- 注意这个地址是7位!7位!7位!!!所以如果你使用硬件IIC的话记得把地址往前面移动1位,然后读地址最低为为1 写地址最低为为0 例如:当ADDR接低的时候,IIC地址为0x46 读地址为0x46+1 写地址为0x46
-
光强的计算方式:光照强度(单位lx)=(High Byte + Low Byte)/ 1.2 * 测量精度
-
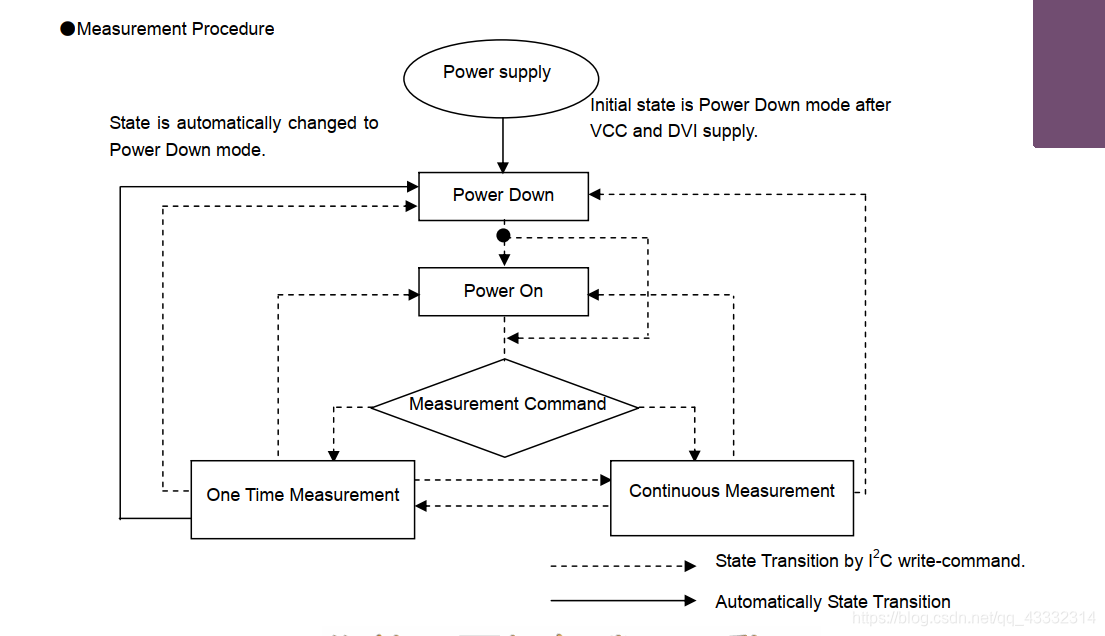
芯片有6种工作模式,需要注意的是,精度越高,测量的时间越长,最长的有120ms,所以你测玩一次就得延时下,然后注意连续测量和单独一次测量的区别,连续测量你发送完上电,配置了测量模式之后,就不断读就行了;单独测量一次,需要你每次测量都先发送上电-测量模式-再去读测量结果
-
其他的都很简单的,如果你懂IIC的话,不懂的话那就在网上找找资料好好学学把
这是BH1750的中文参考手册可以参考下[https://wenku.baidu.com/view/57203d05856a561252d36ff6.html]
- 接下来放代码了
- 主函数很简单,首先检测模块在不在,然后初始化BH1750模块,其实就是发送上电命令,发送测量模式,然后就不断地去读数据就行了
int main(void)
{
LED_GPIO_Config();
USART_Config();
if(i2c_CheckDevice(BH1750_Addr)==0)
printf("BH1750设备检测成功\r\n");
else printf("BH1750设备检测失败\r\n");
BH1750_Init();
printf("光照强度传感器实验\r\n");
while(1)
{
printf("光强:%f lx\r\n",LIght_Intensity());
SysTick_Delay_ms(500);
}
}
接下来就是它的驱动函数了,先看头文件把,里面存放了很多的的定义
#ifndef __BH1750_I2C_H
#define __BH1750_I2C_H
#include "stm32f10x.h"
#include "./I2C_BH1750/i2c_bh1750_gpio.h"
#include "./SYSTICK/systick.h"
//BH1750的地址
#define BH1750_Addr 0x46
//BH1750指令码
#define POWER_OFF 0x00
#define POWER_ON 0x01
#define MODULE_RESET 0x07
#define CONTINUE_H_MODE 0x10
#define CONTINUE_H_MODE2 0x11
#define CONTINUE_L_MODE 0x13
#define ONE_TIME_H_MODE 0x20
#define ONE_TIME_H_MODE2 0x21
#define ONE_TIME_L_MODE 0x23
//测量模式
#define Measure_Mode CONTINUE_H_MODE
//分辨率 光照强度(单位lx)=(High Byte + Low Byte)/ 1.2 * 测量精度
#if ((Measure_Mode==CONTINUE_H_MODE2)|(Measure_Mode==ONE_TIME_H_MODE2))
#define Resolurtion 0.5
#elif ((Measure_Mode==CONTINUE_H_MODE)|(Measure_Mode==ONE_TIME_H_MODE))
#define Resolurtion 1
#elif ((Measure_Mode==CONTINUE_L_MODE)|(Measure_Mode==ONE_TIME_L_MODE))
#define Resolurtion 4
#endif
void BH1750_Init(void); //未包含IIC初始化
float LIght_Intensity(void); //读取光照强度的值
uint8_t BH1750_Byte_Write(uint8_t data);
uint16_t BH1750_Read_Measure(void);
void BH1750_Power_ON(void);
void BH1750_Power_OFF(void);
void BH1750_RESET(void);
#endif /* __BH1750_I2C_H */
C文件如下:只要你懂IIC,懂C那就能看懂在干嘛
#include "./I2C_BH1750/i2c_bh1750.h"
//BH1750写一个字节
//返回值 成功:0 失败:非0
uint8_t BH1750_Byte_Write(uint8_t data)
{
i2c_Start();
//发送写地址
i2c_SendByte(BH1750_Addr|0);
if(i2c_WaitAck()==1)
return 1;
//发送控制命令
i2c_SendByte(data);
if(i2c_WaitAck()==1)
return 2;
i2c_Stop();
return 0;
}
//BH1750读取测量数据
//返回值 成功:返回光照强度 失败:返回0
uint16_t BH1750_Read_Measure(void)
{
uint16_t receive_data=0;
i2c_Start();
//发送读地址
i2c_SendByte(BH1750_Addr|1);
if(i2c_WaitAck()==1)
return 0;
//读取高八位
receive_data=i2c_ReadByte();
i2c_Ack();
//读取低八位
receive_data=(receive_data<<8)+i2c_ReadByte();
i2c_NAck();
i2c_Stop();
return receive_data; //返回读取到的数据
}
//BH1750s上电
void BH1750_Power_ON(void)
{
BH1750_Byte_Write(POWER_ON);
}
//BH1750s断电
void BH1750_Power_OFF(void)
{
BH1750_Byte_Write(POWER_OFF);
}
//BH1750复位 仅在上电时有效
void BH1750_RESET(void)
{
BH1750_Byte_Write(MODULE_RESET);
}
//BH1750初始化
void BH1750_Init(void)
{
BH1750_Power_ON(); //BH1750s上电
//BH1750_RESET(); //BH1750复位
BH1750_Byte_Write(Measure_Mode);
SysTick_Delay_ms(120);
}
//获取光照强度
float LIght_Intensity(void)
{
return (float)(BH1750_Read_Measure()/1.2f);
}
是不是很简单,但是我也不知道为什么使用硬件IIC就是不行,或许真的被我撞上STM32硬件IIC的毛病了,网上说它的毛病是接收应答信号的时间太短了,错过就GG了,有硬件IIC成功的朋友可以来分享下,我写的硬件IIC的代码我也贴出来把,如下:
这是硬件IIC写的头文件
#ifndef _I2C_H_
#define _I2C_H_
#include "stm32f10x.h"
#define stm32_I2C_OWN_Addr 0x5f //IIC通讯中stm32的自身地址 注意地址是7位
#define BH1750_SCL_GPIO_PORT GPIOB
#define BH1750_SCL_GPIO_PIN GPIO_Pin_6
#define BH1750_SCL_APBxClkCmd RCC_APB2PeriphClockCmd
#define BH1750_SCL_GPIO_CLK RCC_APB2Periph_GPIOB
#define BH1750_SDA_GPIO_PORT GPIOB
#define BH1750_SDA_GPIO_PIN GPIO_Pin_7
#define BH1750_SDA_APBxClkCmd RCC_APB2PeriphClockCmd
#define BH1750_SDA_GPIO_CLK RCC_APB2Periph_GPIOB
#define BH1750_I2Cx I2C1
#define I2Cx_BH1750_ClockSpeek 400000
#define I2Cx_BH1750_APBxClkCmd RCC_APB1PeriphClockCmd
#define I2Cx_BH1750_CLK RCC_APB1Periph_I2C1
#define BH1750_Addr 0x46
//BH1750指令码
#define POWER_OFF 0x00
#define POWER_ON 0x01
#define MODULE_RESET 0x07
#define CONTINUE_H_MODE 0x10
#define CONTINUE_H_MODE2 0x11
#define CONTINUE_L_MODE 0x13
#define ONE_TIME_H_MODE 0x20
#define ONE_TIME_H_MODE2 0x21
#define ONE_TIME_L_MODE 0x23
//不同模式下分辨率不同(也即精度不同)
//高分辨率模式2:分辨率是0.5lx
//高分辨率模式:分辨率1lx
//低分辨率模式:分辨率4lx
//不同模式只是精度不一样,对于计算没有区别
//测量模式
#define Measure_Mode ONE_TIME_H_MODE
/*等待超时时间*/
#define I2CT_FLAG_TIMEOUT ((uint32_t)0x1000)
#define I2CT_LONG_TIMEOUT ((uint32_t)(10 * I2CT_FLAG_TIMEOUT))
void I2C_BH1750_Config(void);
void BH1750_Init(void); //未包含IIC初始化
float LIght_Intensity(void); //读取光照强度的值
uint8_t BH1750_Byte_Write(uint8_t data);
uint16_t BH1750_Read_Measure(void);
void BH1750_Power_ON(void);
void BH1750_Power_OFF(void);
void BH1750_RESET(void);
#endif /* _I2C_H_ */
这是硬件IIC写的C文件
#include "./I2C_BH1750/i2c_bh1750.h" //“./”指当前目录
static __IO uint32_t I2CTimeout = I2CT_LONG_TIMEOUT;
void I2C_BH1750_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
I2C_InitTypeDef I2C_InitStruct;
//打开IIC时钟
I2Cx_BH1750_APBxClkCmd(I2Cx_BH1750_CLK, ENABLE);
//打开GPIO时钟
BH1750_SCL_APBxClkCmd(BH1750_SCL_GPIO_CLK, ENABLE);
BH1750_SDA_APBxClkCmd(BH1750_SDA_GPIO_CLK, ENABLE);
//配置SCL引脚
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_OD;
GPIO_InitStruct.GPIO_Pin = BH1750_SCL_GPIO_PIN;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(BH1750_SCL_GPIO_PORT, &GPIO_InitStruct);
//配置SDA引脚
GPIO_InitStruct.GPIO_Pin = BH1750_SDA_GPIO_PIN;
GPIO_Init(BH1750_SDA_GPIO_PORT, &GPIO_InitStruct);
//配置IIC
I2C_InitStruct.I2C_Ack = I2C_Ack_Enable;
I2C_InitStruct.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStruct.I2C_ClockSpeed = I2Cx_BH1750_ClockSpeek;
I2C_InitStruct.I2C_DutyCycle = I2C_DutyCycle_2;
I2C_InitStruct.I2C_Mode = I2C_Mode_I2C;
I2C_InitStruct.I2C_OwnAddress1 = stm32_I2C_OWN_Addr;
I2C_Init(BH1750_I2Cx, &I2C_InitStruct);
I2C_Cmd(BH1750_I2Cx, ENABLE);
}
/*
* 写一个字节的数据给BH1750
* 成功将会返回0,未成功将会返回非0正整数
*/
uint8_t BH1750_Byte_Write(uint8_t data)
{
I2CTimeout = I2CT_LONG_TIMEOUT;
//发送起始信号
I2C_GenerateSTART(BH1750_I2Cx, ENABLE);
//检测EV5事件
while(I2C_CheckEvent(BH1750_I2Cx, I2C_EVENT_MASTER_MODE_SELECT) == ERROR)
{
if((I2CTimeout--) == 0) return 1;
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送地址 写
I2C_Send7bitAddress(BH1750_I2Cx, BH1750_Addr, I2C_Direction_Transmitter);
//检测EV6事件 注意EV6分发送和接收两种
while(I2C_CheckEvent(BH1750_I2Cx, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED) == ERROR)
{
if((I2CTimeout--) == 0)
return 2;
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送要操作的存储单元地址
I2C_SendData(BH1750_I2Cx, data);
//检测EV8_2事件
while(I2C_CheckEvent(BH1750_I2Cx, I2C_EVENT_MASTER_BYTE_TRANSMITTED) == ERROR)
{
if((I2CTimeout--) == 0) return 4;
}
//发送停止信号
I2C_GenerateSTOP(BH1750_I2Cx, ENABLE);
return 0;
}
//读取光照强度传感器的测量值
//成功返回:光照强度传感器寄存器值 失败返回:0
uint16_t BH1750_Read_Measure(void)
{
uint16_t receive_data;
I2CTimeout = I2CT_LONG_TIMEOUT;
//发送起始信号
I2C_GenerateSTART(BH1750_I2Cx, ENABLE);
//检测EV5事件
while(I2C_CheckEvent(BH1750_I2Cx, I2C_EVENT_MASTER_MODE_SELECT) == ERROR)
{
if((I2CTimeout--) == 0) return 0;
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送地址 读
I2C_Send7bitAddress(BH1750_I2Cx, BH1750_Addr, I2C_Direction_Receiver);
//检测EV6事件 注意EV6分发送和接收两种
while(I2C_CheckEvent(BH1750_I2Cx, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED) == ERROR)
{
if((I2CTimeout--) == 0) return 0;
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//读取光照强度的高八位数据
receive_data=I2C_ReceiveData(BH1750_I2Cx);
//产生应答信号
I2C_AcknowledgeConfig(BH1750_I2Cx, ENABLE);
//检测EV7事件
while(I2C_CheckEvent(BH1750_I2Cx, I2C_EVENT_MASTER_BYTE_RECEIVED) == ERROR)
{
if((I2CTimeout--) == 0) return 0;
}
//读取光照强度的低八位数据
receive_data=(receive_data<<8)+I2C_ReceiveData(BH1750_I2Cx);
//产生非应答信号
I2C_AcknowledgeConfig(BH1750_I2Cx, DISABLE);
//发送停止信号
I2C_GenerateSTOP(BH1750_I2Cx, ENABLE);
//返回光照强度的值
return receive_data;
}
//BH1750s上电
void BH1750_Power_ON(void)
{
BH1750_Byte_Write(POWER_ON);
}
//BH1750s断电
void BH1750_Power_OFF(void)
{
BH1750_Byte_Write(POWER_OFF);
}
//BH1750复位
void BH1750_RESET(void)
{
BH1750_Byte_Write(MODULE_RESET);
}
//BH1750初始化
void BH1750_Init(void)
{
BH1750_Power_ON();
BH1750_RESET();
BH1750_Byte_Write(Measure_Mode);
}
//获取光照强度
float LIght_Intensity(void)
{
return (float)(BH1750_Read_Measure()/1.2f*Resolurtion);
}
哪位大佬看了发现问题可以评论下哦
整个工程我也挂在我的博客上了,需要的朋友可以自行提取,stm32驱动BH1750完整工程
**
转发此文请标明出处!
**
智能推荐
什么是内部类?成员内部类、静态内部类、局部内部类和匿名内部类的区别及作用?_成员内部类和局部内部类的区别-程序员宅基地
文章浏览阅读3.4k次,点赞8次,收藏42次。一、什么是内部类?or 内部类的概念内部类是定义在另一个类中的类;下面类TestB是类TestA的内部类。即内部类对象引用了实例化该内部对象的外围类对象。public class TestA{ class TestB {}}二、 为什么需要内部类?or 内部类有什么作用?1、 内部类方法可以访问该类定义所在的作用域中的数据,包括私有数据。2、内部类可以对同一个包中的其他类隐藏起来。3、 当想要定义一个回调函数且不想编写大量代码时,使用匿名内部类比较便捷。三、 内部类的分类成员内部_成员内部类和局部内部类的区别
分布式系统_分布式系统运维工具-程序员宅基地
文章浏览阅读118次。分布式系统要求拆分分布式思想的实质搭配要求分布式系统要求按照某些特定的规则将项目进行拆分。如果将一个项目的所有模板功能都写到一起,当某个模块出现问题时将直接导致整个服务器出现问题。拆分按照业务拆分为不同的服务器,有效的降低系统架构的耦合性在业务拆分的基础上可按照代码层级进行拆分(view、controller、service、pojo)分布式思想的实质分布式思想的实质是为了系统的..._分布式系统运维工具
用Exce分析l数据极简入门_exce l趋势分析数据量-程序员宅基地
文章浏览阅读174次。1.数据源准备2.数据处理step1:数据表处理应用函数:①VLOOKUP函数; ② CONCATENATE函数终表:step2:数据透视表统计分析(1) 透视表汇总不同渠道用户数, 金额(2)透视表汇总不同日期购买用户数,金额(3)透视表汇总不同用户购买订单数,金额step3:讲第二步结果可视化, 比如, 柱形图(1)不同渠道用户数, 金额(2)不同日期..._exce l趋势分析数据量
宁盾堡垒机双因素认证方案_horizon宁盾双因素配置-程序员宅基地
文章浏览阅读3.3k次。堡垒机可以为企业实现服务器、网络设备、数据库、安全设备等的集中管控和安全可靠运行,帮助IT运维人员提高工作效率。通俗来说,就是用来控制哪些人可以登录哪些资产(事先防范和事中控制),以及录像记录登录资产后做了什么事情(事后溯源)。由于堡垒机内部保存着企业所有的设备资产和权限关系,是企业内部信息安全的重要一环。但目前出现的以下问题产生了很大安全隐患:密码设置过于简单,容易被暴力破解;为方便记忆,设置统一的密码,一旦单点被破,极易引发全面危机。在单一的静态密码验证机制下,登录密码是堡垒机安全的唯一_horizon宁盾双因素配置
谷歌浏览器安装(Win、Linux、离线安装)_chrome linux debian离线安装依赖-程序员宅基地
文章浏览阅读7.7k次,点赞4次,收藏16次。Chrome作为一款挺不错的浏览器,其有着诸多的优良特性,并且支持跨平台。其支持(Windows、Linux、Mac OS X、BSD、Android),在绝大多数情况下,其的安装都很简单,但有时会由于网络原因,无法安装,所以在这里总结下Chrome的安装。Windows下的安装:在线安装:离线安装:Linux下的安装:在线安装:离线安装:..._chrome linux debian离线安装依赖
烤仔TVの尚书房 | 逃离北上广?不如押宝越南“北上广”-程序员宅基地
文章浏览阅读153次。中国发达城市榜单每天都在刷新,但无非是北上广轮流坐庄。北京拥有最顶尖的文化资源,上海是“摩登”的国际化大都市,广州是活力四射的千年商都。GDP和发展潜力是衡量城市的数字指...
随便推点
java spark的使用和配置_使用java调用spark注册进去的程序-程序员宅基地
文章浏览阅读3.3k次。前言spark在java使用比较少,多是scala的用法,我这里介绍一下我在项目中使用的代码配置详细算法的使用请点击我主页列表查看版本jar版本说明spark3.0.1scala2.12这个版本注意和spark版本对应,只是为了引jar包springboot版本2.3.2.RELEASEmaven<!-- spark --> <dependency> <gro_使用java调用spark注册进去的程序
汽车零部件开发工具巨头V公司全套bootloader中UDS协议栈源代码,自己完成底层外设驱动开发后,集成即可使用_uds协议栈 源代码-程序员宅基地
文章浏览阅读4.8k次。汽车零部件开发工具巨头V公司全套bootloader中UDS协议栈源代码,自己完成底层外设驱动开发后,集成即可使用,代码精简高效,大厂出品有量产保证。:139800617636213023darcy169_uds协议栈 源代码
AUTOSAR基础篇之OS(下)_autosar 定义了 5 种多核支持类型-程序员宅基地
文章浏览阅读4.6k次,点赞20次,收藏148次。AUTOSAR基础篇之OS(下)前言首先,请问大家几个小小的问题,你清楚:你知道多核OS在什么场景下使用吗?多核系统OS又是如何协同启动或者关闭的呢?AUTOSAR OS存在哪些功能安全等方面的要求呢?多核OS之间的启动关闭与单核相比又存在哪些异同呢?。。。。。。今天,我们来一起探索并回答这些问题。为了便于大家理解,以下是本文的主题大纲:[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-JCXrdI0k-1636287756923)(https://gite_autosar 定义了 5 种多核支持类型
VS报错无法打开自己写的头文件_vs2013打不开自己定义的头文件-程序员宅基地
文章浏览阅读2.2k次,点赞6次,收藏14次。原因:自己写的头文件没有被加入到方案的包含目录中去,无法被检索到,也就无法打开。将自己写的头文件都放入header files。然后在VS界面上,右键方案名,点击属性。将自己头文件夹的目录添加进去。_vs2013打不开自己定义的头文件
【Redis】Redis基础命令集详解_redis命令-程序员宅基地
文章浏览阅读3.3w次,点赞80次,收藏342次。此时,可以将系统中所有用户的 Session 数据全部保存到 Redis 中,用户在提交新的请求后,系统先从Redis 中查找相应的Session 数据,如果存在,则再进行相关操作,否则跳转到登录页面。此时,可以将系统中所有用户的 Session 数据全部保存到 Redis 中,用户在提交新的请求后,系统先从Redis 中查找相应的Session 数据,如果存在,则再进行相关操作,否则跳转到登录页面。当数据量很大时,count 的数量的指定可能会不起作用,Redis 会自动调整每次的遍历数目。_redis命令
URP渲染管线简介-程序员宅基地
文章浏览阅读449次,点赞3次,收藏3次。URP的设计目标是在保持高性能的同时,提供更多的渲染功能和自定义选项。与普通项目相比,会多出Presets文件夹,里面包含着一些设置,包括本色,声音,法线,贴图等设置。全局只有主光源和附加光源,主光源只支持平行光,附加光源数量有限制,主光源和附加光源在一次Pass中可以一起着色。URP:全局只有主光源和附加光源,主光源只支持平行光,附加光源数量有限制,一次Pass可以计算多个光源。可编程渲染管线:渲染策略是可以供程序员定制的,可以定制的有:光照计算和光源,深度测试,摄像机光照烘焙,后期处理策略等等。_urp渲染管线